

فرق بین آمپر، ولت و وات چیست؟ (راهنمایی سریع)
مهر ۷, ۱۳۹۶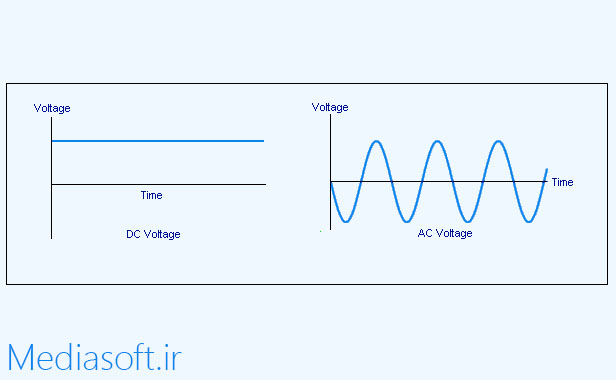
جریان متناوب (AC) و جریان مستقیم (DC) چه هستند و چه تفاوتی دارند؟
مهر ۷, ۱۳۹۶
ربات یک ماشین است (بهخصوص ماشینی که توسط کامپیوتر قابل برنامهنویسی باشد ) که میتواند مجموعه کارهای پیچیدهای را بهصورت خودکار انجام دهد.
برای آشنایی کامل با تاریخچه ربات، چگونگی پیدایش و سیر تحول و پیشرفت آن و همچنین کاربردها و تاثیرات ربات بر زندگی انسان با مدیاسافت همراه باشید.
رباتها ممکن است توسط یک دستگاه کنترل خارجی، کنترل شوند یا اینکه دستگاه کنترلی در داخل آنها قرار بگیرد. رباتها ممکن است بهگونهای ساخته شوند که ظاهری شبیه به انسان داشته باشند اما بیشتر رباتها، ماشینهایی هستند که برای انجام کاری ساخته میشوند و ظاهر آنها اهمیتی ندارد.
رباتها ممکن است خودگردان یا نیمه خودگردان باشند و انواع مختلفی از قبیل رباتهای انساننما، مانند ربات ASIMO شرکت هوندا و ربات پینگپونگباز شرکت TOSY، رباتهای صنعتی، رباتهای جراحی پزشکی، رباتهای کمک به بیماران، رباتهای سگ درمانی، رباتهای کوچک که از هوش جمعی بهره میبرند، پهباد هایی مانند هواپیمای بدون سرنشین MQ-1 Predator که توسط نیروی هوایی ایالاتمتحده مورداستفاده قرار میگیرد و حتی رباتهای میکروسکوپی(نانو رباتها) را شامل میشوند. رباتها ممکن است با تقلید از ظاهر موجودات زنده و یا شبیهسازی حرکات آنها، حس هوشمند بودن و یا توانایی فکر کردن را به انسان القا کنند. انتظار میرود تا در دهه آتی، اشیا خودگردان گسترش چشمگیری پیدا کنند. از ارکان اصلی این گسترش میتوان به رباتهای خانگی و اتومبیلهای خودگردان اشاره کرد.
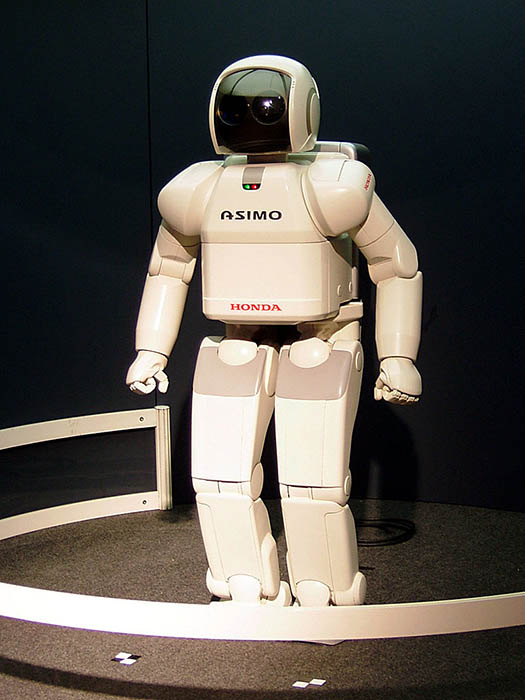
ربات ASIMO در نمایشگاه Expo 2005 ؛ یک ربات انساننمای دو پا
رباتیک
شاخهای از فنّاوری که با طراحی، ساخت، اجرا و کاربرد رباتها به همراه سیستمهای کامپیوتری لازم برای کنترل ، دریافت پاسخ سنسورها و پردازش اطلاعات آنها سر و کار دارد رباتیک نام دارد. این فنّاوری ها با ماشینهای خودکاری سر و کار دارند که میتوانند جای انسان را در محیط های خطرناک و یا در فرآیند های تولید بگیرند یا میتوانند از نظر ظاهر، رفتار و یا فرآیند های یادگیری و درک شبیه انسان عمل کنند. امروزه بسیاری از رباتها از طبیعت الهام گرفتهشدهاند و شاخهای به نام رباتیک الهام گرفته از طبیعت را ایجاد کردهاند. این رباتها همچنین شاخه جدیدتری به نام رباتیک نرم را نیز پدید آوردهاند.
از زمان تمدنهای باستانی، موارد بسیاری از دستگاههای خودکار که توسط انسان قابل تنظیم بودند و یا حتی ماشینهای خودکاری که شبیه انسان و یا حیوانات بودند و عمدتاً بهعنوان سرگرمی به کار میرفتند ثبتشده است. با پیشرفت روشهای مکانیکی در عصر انقلاب صنعتی، کاربردهای مفیدتری مانند ماشینهای خودکار یا ماشینهای کنترل از راه دور و کنترل از راه دور بیسیم، اختراع شدند.
کلمه “ربات” اولین بار در نمایشنامه کارخانه رباتسازی روسوم که توسط کارل چاپک نویسنده اهل جمهوری چک نوشته شده به کار رفت. در این نمایشنامه کلمه ربات به یک موجود خیالی شبیه به انسان اطلاق میشد. بنابراین چاپک، خالق حقیقی واژه ربات است. با ظهور اولین رباتهای الکترونیکی خودگردان که در سال 1948 توسط William Grey Walter در شهر Bristol انگلستان ساخته شد و همچنین ماشینهای کنترل عددی کامپیوتری(CNC) در اواخر دهه 1940 میلادی توسط John T. Parsons و Frank L. Stulen، علم الکترونیک به نیروی پیشران توسعه تبدیل شد. اولین ربات تجاری، دیجیتال و قابل برنامه ریزی توسط George Devol در سال 1954 ساخته شد. نام این ربات Unimate بود. این ربات در سال 1961 به شرکت General Motors فروخته شد. در این شرکت از این ربات برای بلند کردن قطعاتی از فلز داغ از دستگاههای ریختهگری در کارخانه این شرکت در ایالت NewJersey استفاده میشد.
رباتها در انجام مسئولیتهای تکرارشونده و خطرناک که انسانها ترجیح میدهند آنها را انجام ندهند، یا به دلیل محدودیت از نظر اندازه نمیتوانند انجام دهند و یا به دلیل اینکه در محیط های بسیار سخت مانند فضا و یا در کف اقیانوسهای انجام میشوند، جایگزین انسانها شدهاند.
نگرانیهایی در مورداستفاده روزافزون از رباتها و نقش آنها در جامعه نیز وجود دارد. رباتها اغلب بهعنوان یکی از عوامل افزایش بیکاری شناخته میشوند زیرا امروزه آنها در کارهای مختلفی جایگزین کارگران میشوند. استفاده از رباتها در کارهای نظامی نیز نگرانیهایی اخلاقی را به دنبال داشته است. احتمال خودگردانی کامل رباتها و تبعات منفی بعدی آن در بسیاری از داستانهای تخیلی مطرحشده و ممکن است در آینده به نگرانی جدی تبدیل شود.
برای درک بیشتر از مفهوم رباتیک میتوانید به مطلب زیر مراجعه نمایید:
خلاصه
واژه ربات میتواند هم به رباتهای واقعی و هم به واسط های مجازی نرم افزاری اشاره کند؛ البته در بیشتر موارد برای مورد دوم از واژه “بات” استفاده می شود. بهطورکلی، در مورد اینکه چه ماشینهایی در دسته رباتها قرار میگیرند اجماع جمعی وجود ندارد اما تقریباً تمام متخصصان و همچنین مردم معتقدند که رباتها همه یا برخی از تواناییها و قابلیتهای زیر را داشته باشند: 1- قبول کردن برنامهنویسی الکترونیکی 2-پردازش دادهها یا درکهای فیزیکی بهصورت الکترونیکی 3- تا حدودی خودگردان عمل کردن 4- جابجا شدن 5- استفاده از اجزا مختلف بدنه خود بهصورت کاربردی یا استفاده از فرآیند های فیزیکی، توانایی تشخیص و ایجاد تغییر در محیط و توانایی نشان دادن رفتار هوشمندانه؛ بهخصوص رفتاری که شبیه به رفتار انسانها یا سایر حیوانات باشد. زیستشناسی مصنوعی رشتهای است که ارتباط نزدیکی با مفهوم ربات دارد. در این رشته به مطالعه گونههایی که طبیعتشان بهجای ماشینها، بیشتر شبیه به موجودات است پرداخته می شود.
تاریخچه ساخت ربات و ماشین های خودکار
ایده ماشینهای خودکار از اساطیر فرهنگهای مختلف سراسر جهان نشاءت گرفته است. مهندسین و مخترعان تمدنهای باستانی مانند چین باستان، یونان باستان و مصر باستان تلاش میکردند تا ماشینهایی خودکار بسازند که بعضی از آنها شبیه به حیوانات یا انسان بودند. اولین ماشینهای خودکار ساختهشده کبوترهای مصنوعی ساختهشده توسط ارخوطس، پرندههای مصنوعی Mozi و Lu Ban، ماشین خودکار سخنگوی هرون اسکندرانی، روشویی خودکار فیلوی بیزانسی و ماشینی خودکار شبیه به انسان است که در کتاب Liezi توصیف شده است.
دوره آغازین
بسیاری از اساطیر باستانی و بیشترین ادیان جدید در مورد انسانهای مصنوعی صحبت کردهاند. برای نمونه میتوان به خدمتکاران مکانیکی ساختهشده توسط خدای آهنگری و صنعت یونان باستان، هفائستوس، گولم های گِلی افسانه های یهودی، غول های گِلی افسانه های نورس(اسکاندیناوی) و گالاتئا، مجسمه افسانه ای متعلق به پوگمالیون که زنده شد اشاره کرد. از زمان قرن چهارم قبل از میلاد مسیح، اساطیر جزیره کرت به تالوس اشاره میکردند. تالوس مردی ساختهشده از برنز(برنج) بود که از جزیره کرت در برابر حمله دزدان دریایی محافظت می کرد.
در یونان باستان، مهندس یونانی به نام تسیبیوس( 270 سال قبل از میلاد) دانش خود در زمینه خواص هوا و گاز ها و همچنین هیدرولیک را به کار گرفت تا اولین ساز هیدرولیکی و همچنین اولین ساعت آبی با ارقام متحرک را اختراع کند. در قرن 4 قبل از میلاد، ریاضی دان یونانی ارخوطس، پرنده ای مکانیکی ساخت که با بخار کار می کرد. او این پرنده را “کبوتر” خطاب می کرد. هرون اسکندرانی، ریاضی دان و مخترع یونانی در قرن اول پس از میلاد چندین دستگاه خودکار ساخت که توسط کاربر قابل تنظیم بودند. او همچنین در متون باقی مانده از خود ماشینهایی را توصیف کرده که با فشار هوا، بخار و یا آب کار میکردند.
در متن Lokapannatti ( متنی متعلق به قرن 11 بعد از میلاد در مورد کیهان شناسی آیین بودایی) آمده که یادگار های بودا توسط رباتهای مکانیکی در برابر حملات امپراطوری رُم محافظت میشدند؛ تا اینکه این رباتها توسط آشوکا شاه خلع سلاح شدند.
در چین باستان، کتاب Lie Zi متعلق به قرن سوم پس از میلاد، روایتی را از یک ماشین خودکار شبیه به انسان توصیف می کند. در این روایت که متعلق به چندین قرن قبل از نوشته شدن این کتاب است امپراطور چین King Mu of Zhou و یک مهندس مکانیک به نام Yan Shi که یک سازنده ماهر بود با یکدیگر ملاقات می کنند. در این ملاقات Yan Shi ، یک کاردستی مکانیکی به شکل پادشاه را با ابعاد مشابه با ابعاد واقعی او، با افتخار به او تقدیم می کند. این کاردستی از چرم، چوب و اعضای مصنوعی ساختهشده بود. همچنین در کتاب Han Fei Zi و سایر کتاب ها و سایر کتاب ها به مواردی از ماشین پرنده خودکار اشاره شده است. در این کتاب ها موزی، فیسلوف موهیستی قرن 5 قبل از میلاد و Lu Ban، مهندس چینی هم عصر با او بهعنوان مخترعین پرندههای مصنوعی چوبی که میتوانستند واقعا پرواز کنند شناخته شدهاند. در سال 1066، مخترع چینی، سوسانگ، ساعت آبی را به شکل یک برج ساخت که دارای مجسمه های مکانیکی بود که در ساعت های مختلف روز به حرکت در می آمدند.

ماکتی از ساعت آبی سوسانگ – عکس از Getty Images
محققان شروع عصر ماشینهای خودکار را از زمان اختراع ساعت آبی سوسانگ و مجسمه های مکانیکی آن دانسته اند. این مجسمه ها در ساعت های مختلف روز به حرکت در می آمدند. این مجسمه ها از مکانیزمی استفاده میکردند که در آن از یک ماشین درام قابل برنامه ریزی استفاده شده بود. در این سیستم بادامک هایی وجود داشت که به اهرم های کوچکی متصل شده بود و این اهرم ها، برای ایجاد صدا با استفاده از سازهای ضربه ای(پرکاشن) مورداستفاده قرار می گرفتند. با جابجایی بادامک ها به محل های مختلف، این ماشین درام ریتم ها و الگو های مختلفی را به تولید می کرد.
در ایتالیای دوران رنسانس، لئوناردو داوینچی در سال 1495 طرح های اولیه ای را از یک ربات انساننما کشید. دفتر های یادداشت داوینچی که در دهه 1950 پیدا شد دارای طرح های با جزئیاتی از یک شوالیه مکانیکی بود که امروزه با نام ربات لئوناردو شناخته می شود. این ماشین میتوانست بشیند و بازو ها، سر و فکش را نیز تکان دهد. طراحی این دستگاه بر مبنای تحقیقات آناتومیک داوینچی بود که در طراحی دیگر او به نام مرد ویترویوسی نمایش داده شده است. معلوم نیست که داوینچی برای ساخت این ربات تلاش کرد یا خیر.

مدلی از ربات لئوناردو به همراه قسمت های داخلی آن – احتمال میرود که این ربات توسط لئوناردو داوینچی و در سال 1495 ساخته شده باشد
در ژاپن، بین قرن های 17 تا 19 ماشینهای خودکار پیچیده ای به شکل انسان و حیوانات ساخته میشد. بسیاری از این ماشینها در کتاب Karakuri zui متعلق به قرن 18 نمایش داده شدهاند. یکی از این ماشینها، یک عروسک مکانیکی به نام karakuri ningyō بود. مدل های مختلفی از karakuri نیز وجود داشت؛ Butai karakuri که اغلب در نمایش ها مورداستفاده قرار می گرفت، Zashiki karakuri که کوچک بود و در خانه ها استفاده میشد و Dashi karakuri که در مراسم مذهبی استفاده میشد. در این گونه مراسم مذهبی از این عروسک ها برای بازآفرینی افسانه ها و اساطیر استفاده میشد.
در فرانسه، بین سال های 1738 و 1739، ژاک ووکانسن چندین ماشین با اندازه های واقعی ساخت. این ماشینها شامل یک نوازنده فلوت، یک نوازنده نی و همچنین یک اردک مکانیکی بودند. این اردک مکانیکی میتوانست بال هایش را تکان دهد، گردنش را بالا و پایین ببرد، غذا را از دست بازدیدکننده ببلعد و با دفع ماده ای که در قسمت داخلی آن کار گذاشته شده بود حس توانایی هضم غذا را به بیننده القا کند.
سیستمهای کنترل از راه دور
وسایلی که با کنترل از راه دور کار میکردند در اواخر قرن نوزدهم و به شکل چند اژدر کنترل از راه دور ظاهر شدند. در اوایل دهه 1870 میلادی، اژدر های کنترل از راه دور توسط جان اریکسن( بهصورت پنوماتیک)، جان لوییس لِی (هدایت بهصورت الکتریکی و با کمک سیم) و ویکتور وُن شلیها( هدایت بهصورت الکترونیکی و با کمک سیم) ساخته شدند.
اژدر بِرِنان که توسط Louis Brennan در سال 1877 اختراع شد، نیرو محرکه خود را از دو پروانه که در جهت عکس یکدیگر می چرخیدند به دست می آورد. این دو پروانه با بیرون آوردن سریع سیم های فولادی از طبلک هایی که در داخل اژدر قرار گرفته بودند، به چرخش در می آمدند. اختلاف سرعت در در آزاد کردن سیم ها، به ایستگاه ساحلی اجازه می داد تا اژدر را به سمت هدفش هدایت کند. این اژدر اولین موشک قابل هدایت کاربردی در دنیا بود. در سال 1897، مخترع بریتانیایی Ernest Wilson، گواهی ثبت اختراع، برای ساخت یک اژدر که توسط امواج هرتیزان(رادیویی) کنترل میشد را به نام خود ثبت کرد و در سال 1898، Nikola Tesla یک اژدر کنترل از راه دور بیسیم را بهصورت عمومی در معرض نمایش گذاشت زیرا قصد داشت آن را به نیروی دریایی ایالاتمتحده بفروشد.
Archibald Low، به دلیل تحقیقات نوآورانه اش بر روی موشک ها و هواپیما های هدایت پذیر در جریان جنگ جهانی اول بهعنوان “پدر سیستمهای هدایت رادیویی” شناخته می شود. در سال 1917، او یک هواپیمای کنترل از راه دور را برای یگان پروازی سلطنتی بریتانیا به نمایش گذاشت و در همان سال، اولین موشک هدایت شونده با سیم را ساخت.
ریشه واژه “ربات”
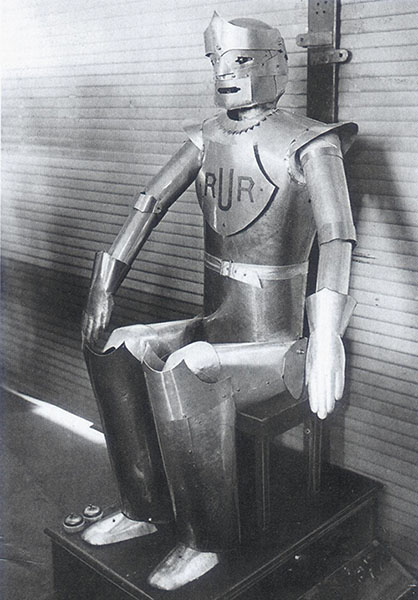
واژه “ربات” اولین بار برای یک ماشین انساننمای خودکار در نمایشنامه کارخانه رباتسازی روسوم که توسط کارل چاپک نویسنده اهل جمهوری چک در سال 1920 نوشته شده به کار رفت. اما کارل، برادرش جوزف چاپک را بهعنوان مخترع اصلی واژه ربات می شناسد. خود کلمه “ربات”، کلمه ای جدید نبود و در زبان اسلاوی، بهصورت robota(کارگر اجباری) وجود داشت. منظور از این واژه آن دسته از روستاییان و کشاورزانی بودند که تحت نظام فئودالی حاکم بر اروپای قرن نوزدهم، مجبور به کار اجباری برای فئودال ها بودند. در داستان تخیلی چاپک، انسانهای مصنوعی و بدون روح، با کمک فنّاوری های جدیدی خلق میشدند. چاپک به خوبی این ماشینها را در همان زمینه قدیمی طبقه اجتماعی robota های دوران فئودالیسم قرار داد به طوری که واژه ربات در نمایشنامه او به دسته جدیدی از کارگر های مصنوعی و ساخته دست بشر اشاره داشت.

صحنه ای از نمایش نامه کارخانه ربات سازی روسوم نوشته شده توسط کارل چاپک که در آن سه ربات مشخص هستند
رباتهای اولیه
در سال 1928، یکی از اولین رباتهای انساننما به نام اریک، در نمایشگاه سالانه انجمن MES به نمایش گذاشته شد. او در این گردهمایی سخنرانی کرد. این ربات که توسط W. H. Richards ساختهشده بود دارای بدنه آلومینیومی، 11 آهنربای الکتریکی و یک موتور حرکتی بود که توان آن توسط منبع تغذیه 12 ولتی تامین میشد. این ربات میتوانست دست ها و سرش را تکان دهد و از طریق کنترل از راه دور و یا کنترل صوتی هدایت میشد. اریک و ربات بردارش یعنی جرج، برای نمایش قابلیتهایشان، به دور دنیا سفر کردند.
ربات اریک – سال 1928 میلادی
در سال 1926، شرکت Westinghouse، ربات Televox را معرفی کرد. این ربات از جنس مقوا ساختهشده بود و به چند دستگاه برقی دیگر متصل بود و کاربر میتوانست با استفاده از این ربات، آنها را خاموش یا روشن کند.
در سال 1939، ربات انساننمای Elektro، در نمایشگاه جهانی نیویورک رونمایی شد. این ربات قدی معادل 2 متر و 10 سانتیمتر و وزنی معادل 120 کیلوگرم داشت و میتوانست از طریق فرم آنهای صوتی حرکت کند، حدود 700 کلمه صحبت کند(با استفاده از یک گرامافون با سرعت 78 دوران در دقیقه)، سیگار بکشد، بادکنک ها را بترکاند و سر و دستانش را تکان دهد. بدنه این ربات از چرخنده های فولادی و چارچوبی برای نصب موتور دستگاه ساختهشده بود و روی آن پوشش آلومینیومی کشیده شده بود. در سال 1928، اولین ربات ساخت کشور ژاپن به نام Gakutensoku توسط ماکوتو نیشیمورا (زیست شناس) طراحی و ساخته شد.
رباتهای جدید خودگردان یا خودمختار (autonomous robots)
اولین رباتهای الکترونیکی خودگردان با رفتار پیچیده توسط William Grey Walter در موسسه عصبی Burden در شهر بریستول انگلستان و در سال های 1948 و 1949 ساخته شدند. او می خواست ثابت کند ارتباطات زیاد بین تعداد محدودی از سلول های مغز میتواند باعث نمود رفتار های بسیار پیچیده ای شود. در واقع او معتقد بود راز نحوه کار کردن مغز در در نحوه اتصال اجزای آن نهفته است. اولین رباتهای ساخت او، به نام Elmer و Elsie بین سال های 1948 و 1949 ساخته شدند و اغلب به دلیل شکل و سرعت پایین حرکتشان به آنها لاک پشت گفته میشد. این رباتهای لاک پشتی سه چرخه، از قابلیت فتوتاکسیس( ردیابی مسیر نور تابانده شده) بهره می بردند و با کمک این قابلیت میتوانستند در صورت کم شدن باتری، مسیر خود را به ایستگاه شارژ مجدد پیدا کنند.
Walter بر استفاده از الکترونیک آنالوگ برای شبیهسازی فرآیند های مغزی تاکید داشت در حالی که افراد هم عصر او مانند Alan Turing و John von Neumann به فرآیند های ذهنی بهصورت دیجیتال نگاه میکردند. کار های او الهام بخش بسیاری از محققین رباتیک نسل های آینده مانند Rodney Brooks ، Hans Moravec و Mark Tilden بود. تجسم های جدیدی از رباتهای Walter را میتوان در شاخهای از رباتیک به نام رباتیک BEAM( زیستشناسی، الکترونیک، زیبایی شناسی و مکانیک) مشاهده کرد.
اولین رباتی که بهصورت دیجیتالی عمل می کرد و قابل برنامه ریزی بود توسط George Devol در سال 1954 ساخته شد و در نهایت Unimate نام گرفت. این ربات، زمینه را برای صنعت رباتیک مدرن فراهم کرد. Devol اولین Unimate را در سال 1960 به شرکت جنرال موتورز فروخت. این ربات در سال 1961 در یکی از کارخانه های این شرکت در نیوجرزی آمریکا نصب شد تا قطعات داغ فلز را از یک دستگاه ریختهگری بلندکرده و آنها را در جایی انبار کند. گواهی ثبت اختراع Devol برای اولین بازوی رباتیک قابل برنامه ریزی و تمام دیجیتال، بهعنوان پایه و اساس صنعت رباتیک مدرن شناخته می شود.
اولین ربات palletizer(ربات برداشت مواد و قرار دادن آنها در جایی دیگر) در سال 1963 و توسط شرکت Fuji Yusoki Kogyo ساخته شد. در سال 1973، رباتی با شش محور الکترومکانیکی توسط شرکت رباتیک KUKA در آلمان ثبت شد. باز رباتیک مفصلی(PUMA) توسط Victor Scheinman در سال 1976 ساخته شد و طرح آن به شرکت Unimation فروخته شد.
کاربرد رباتهای صنعتی و تجاری امروزه به شدت افزایش پیدا کرده و این رباتها، وظایفشان را ارزان تر و یا با دقت و اطمینان پذیری بیشتری نسبت به انسانها انجام میدهند. از رباتها همچنین برای انجام کارهایی استفاده می شود که انجام دادن آنها برای انسانها، بسیار سخت یا خطرناک یا کسل کننده است. رباتها، کاربردهای فراوانی در تولید، مونتاژ، بسته بندی، حمل و نقل، اکتشافات زمینی و فضایی، جراحی های پزشکی، سلاح های نظامی، تحقیقات آزمایشگاهی و تولید انبوه کالاهای مصرفی و صنعتی دارند.
آینده رباتیک
روشهای مختلفی برای توسعه علم رباتیک و رباتها به وجود آمده است. یکی از این روش ها رباتیک تکاملی نام دارد که در آن تعدادی از رباتهای مختلف تحت آزمایش های متفاوتی قرار میگیرند. آن دسته از رباتهایی که عملکرد بهتری را در آزمایش های فوق داشته باشند بهعنوان مدلی برای ساخت نسل بعدی رباتها مورداستفاده قرار میگیرند. یکی دیگر از این روش ها، رباتیک توسعه ای نام دارد که تغییرات و پیشرفت های یک ربات را در زمینه های حل مسئله و کاربردهای دیگر مورد بررسی قرار می دهد. اخیرا نوع جدیدی از رباتها معرفی شده که هم بهعنوان یک گوشی هوشمند و هم بهعنوان ربات عمل می کند و نام آن RoboHon است.
با پیشرفته تر شدن رباتها، ممکن است در آینده به سیستم عامل استانداردی برای آنها نیاز باشد. “سیستم عامل ربات”(ROS) مجموعه ای از برنامه های کد منبع باز است که در حال حاضر در دانشگاه استنفورد، دانشگاه MIT و دانشگاه فنی مونیخ و البته چند دانشگاه دیگر در حال توسعه است. ROS امکان برنامهنویسی سیستم جهت یابی و اعضای بدن ربات را، صرف نظر از نوع سخت افزار به کار رفته در آن، فراهم می کند. همچنین این سیستم عامل دستورات سطح بالایی را نیز برای مواردی چون تشخیص تصویر و یا باز کردن در ها ارائه می کند. وقتی سیستم عامل ROS بر روی کامپیوتر داخلی ربات بوت می شود، دادههایی مانند طول و میزان حرکت اعضای مختلف ربات را به دست می آورد. این دادهها از طریق سیستم عامل به الگوریتم های سطح بالاتری منتقل میشوند. علاوه بر این، مایکروسافت نیز با کمک نرم افزار Robotics Developer Studio که از سال 2007 در دسترس است، در حال توسعه یک سیستم عامل به نام”ویندوز برای رباتها” می باشد.
ژاپن امیدوار است تا سال 2025 بتواند تمامی رباتهای خدماتی را بهصورت تمام مقیاس، تجاری سازی کند. بسیاری از تحقیقات در زمینه فناوری در ژاپن توسط موسسات وابسته به دولت، بهخصوص وزارت بازرگانی این کشور انجام می شود.
بسیاری از کاربردهای رباتها در آینده برای مردم مشخص است. اما این در حالی است که این کاربرد ها در حال حاضر بسیار دور از دسترس توانایی فعلی رباتها هستند. حتی از سال 1982، این اطمینان وجود داشت که روزی رباتها میتوانند:
- قطعات را با جدا کردن ضایعات قالب گیری تمیز کنند.
- اتومبیل ها را با اسپری و بدون دخالت انسان رنگ کنند.
- چیز های مختلفی را بسته بندی کنند( مثلا بسته های شکلات را بهصورت کاملا مرتب در جعبه قرار دهند).
- کابل های هارنس بسازند.
- کامیون ها را با جعبه های محصولات پر کنند.
- کالا های نرم مانند پوشاک و کفش را منتقل کنند .
- پشم چینی گوسفندان را انجام دهند .
- پروتز (اندام های مصنوعی) را تهیه و نصب کنند.
- غذا های فست فودی را آماده کنند و یا در سایر صنایع خدماتی کار کنند.
- در خانه مشغول به کار شوند (رباتهای خانگی).
- بهطورکلی میتوان گفت این پیش بینی ها در بازه زمانی فعلی بیش از حد خوشبینانه است.
کاربردهای جدید و نمونه های اولیه آنها
در سال 2008، شرکت Caterpillar، ایده ساخت دامپ تراکی را که میتوانست بدون نیاز به راننده، مواد معدنی را از معدن به بیرون منتقل کند، مطرح کرد. بسیاری از تحلیل گران معتقدند کامیون های بدون راننده، در نهایت لجستیک را متحول خواهد کرد و انقلابی عظیم را در صنعت به وجود خواهد آورد.تا پایان سال 2014، Caterpillar توانست این دامپ تراک تمام اتوماتیک را بسازد که انتظار میرود فرآیند معدن کاری را به طور چشمگیری متحول کند. در سال 2015، این کامیون های ساخت Caterpillar توسط شرکت معدنیRio Tinto Coal Australia ، به طور کامل در عملیات معدن کاری در استرالیا مورداستفاده قرار گرفتند. برخی تحلیل گران معتقدند در چند دهه آینده، بسیاری از کامیون ها کاملا خودکار خواهند بود.
یک ربات باسواد ( رباتی که توانایی خواندن دارد) به نام Marge، از طریق هوش مصنوعی خود میتواند روزنامه بخواند، کلماتی را که از نظر املایی مشکل دارند پیدا کرده و تصحیح کند، در مورد بانک های مختلف مثلا بانک Barclays یاد بگیرد و متوجه شود که برای غذا خوردن، برخی رستورانها مناسب تر از بقیه هستند.
Baxter یک ربات جدید است که در سال 2012 معرفی شد. این ربات میتواند با هدایت دیگران، چیز های جدیدی یاد بگیرد. برای مثال یک کارگر میتواند به Baxter یاد دهد که یک کار را چگونه انجام دهد. برای این کار او دست هایش را به شکل مورد نظر حرکت می دهد و Baxter حرکات دست او را به خاطر می سپارد. برای تنظیم میزان دقت و ویژگی های مختلف دیگر، دکمه ها و کنترل های بیشتری بر روی دستBaxter وجود دارد. هر کارگر ساده ای میتواند Baxter را برنامه ریزی کند و این کار تنها چند دقیقه زمان می برد. کاری که برای سایر رباتهای صنعتی، به میزان زیادی برنامهنویسی و کد نوشتن نیاز دارد تا بتوان از آن استفاده کرد. در واقع میتوان گفت Baxter برای عمل کردن به برنامهنویسی احتیاج ندارد. به هیچ مهندس نرم افزاری نیاز ندارد. همچنین میتوان به Baxter آموزش داد تا بتواند کار های پیچیده تر و یا چند کار را بهصورت همزمان انجام دهد. در سال 2015، ربات دیگری به نام Sawyer برای انجام کارهای کوچک تر و دقیق تر ساخته شد.

Baxter یک ربات جدید است که در سال 2012 معرفی شد.
ریشه شناسی ربات (اتیمولوژی)
واژه ربات برای اولین بار توسط کارل چاپک نویسنده اهل جمهوری چک و در نمایشنامه کارخانه رباتسازی روسوم در سال 1920 مورداستفاده قرار گرفت. این نمایشنامه در یک کارخانه شروع می شود که در آن از یک ماده شیمیایی بهجای پروتوپلاسم(بخش زنده سلول) استفاده می شود تا بتوان انس آنهایی زنده ولی ساده را تولید کرد که به آنها ربات گفته می شود. این نمایشنامه بر روی جزئیات تکنولوژیکی ساخت این موجودات زنده تمرکز نمی کند اما ظاهر این موجودات، دربردارنده ایده های اولیه رباتهای انساننما ( اندروید) می باشد. این رباتهای کارگر که به طور انبوه تولید شدهاند، بهصورت بسیار پربازده ولی بدون احساس، ناتوان از فکر کردن بهصورت ابتکاری و بی تفاوت نسبت به حفظ جان خود به تصویر کشیده شدهاند.
یکی از مشکلات مطرحشده در این نمایشنامه این است که آیا رباتها مورد بهره کِشی قرار میگیرند یا نه و در ادامه تبعات وابستگی شدید انسان به نیروی کار مصنوعی نمایش داده می شود( بهخصوص بعد از اینکه تعدادی از رباتهای ساختهشده با روشی خاص، به خودآگاهی می رسند و رباتهای سرتاسر دنیا را به شورش علیه انسانها تحریک می کنند).
کارل چاپک خودش این واژه را اختراع نکرد. او نامه ای کوتاه به بخش ریشه شناسی فرهنگ لغت انگلیسی آکسفورد نوشت و در آن برادرش جوزف چاپک را که یک نویسنده و نقاش بود بهعنوان خالق اولیه کلمه ربات معرفی کرد.
چاپک در مقاله ای که در مجله Lidové noviny (متعلق به جمهوری چک) منتشر شد توضیح داد که در ابتدا قصد داشت این موجودات را laboři( کارگر به زبان لاتین) نامگذاری کند اما از این کلمه خوشش نمی آمد، بنابراین از برادرش مشورت گرفت. جوزف نیز به او کلمه ی roboti را پیشنهاد کرد.
Robota در زبان چک، از نظر ادبی به معنای بیگاری و کار اجباری و همچنین بهصورت تلویحی به معنای کار سخت و دشوار است و همچنین در بسیاری از زبانهای اسلاوی( مانند بلغاری،روسی، صربی، لهستانی، مقدونیه ای،اوکراینی و مجارستانی)، این واژه به معنای عمومی کار و نیروی کار است.
به طور سنتی، Robota مدت زمانی بود که یک کارگر باید بهصورت اجباری در اختیار اربابش قرار می گرفت. این مدت به طور معمول 6 ماه از سال در نظر گرفته میشد. ریشه این کلمه در زبان اسلاوی کلیسایی باستان است که در آن rabota به معنی بندگی و خدمت اجباری است که البته خود این واژه نیز از ریشه *orbh- متعلق به زبان پوروا هندواروپایی گرفته شده است. واژه ربات با ریشه آلمانی Arbeit( به معنی کار) هم ریشه تلقی می شود.
واژه رباتیک به که برای توصیف علم بررسی رباتها استفاده می شود، اولین بار توسط ایزاک آسیموف، نویسنده داستانهای علمی-تخیلی استفاده شد. آسیموف، زمینه ای به نام “سه قانون اصلی رباتیک” را ساخت که در داستانهای مختلف او مورداستفاده قرار گرفته است.
این قوانین در داستانهای تخیلی دیگر که توسط نویسنده های مختلفی نوشته شده نیز مورداستفاده قرار گرفته اند ( سه قانون مطرحشده توسط آسیموف کاملا تخیلی هستند و هیچ فناوری که تاکنون ساختهشده باشد توانایی درک یا پیروی از آنها را ندارد. درحقیقت، بسیاری از رباتها برای کاربردهای نظامی ساخته میشوند که کاملا بر خلاف آنچه در قانون اول آسیموف گفته شده، است و در برخی موارد، قانون سوم او را نیز نقض می کند).
پروفسور Joanna Bryson از دانشگاه University of Bath در این باره می گوید: “مردم اغلب در مورد قانون های آسیموف فکر می کنند؛ اما این قوانین برای این طراحی شده بودند تا نشان دهند یک سیستم اخلاقی ساده هرگز موثر نخواهد بود؛ اگر داستانهای کوتاه آسیموف را بخوانید خواهید دید که در تمامی آنها، عدم پیروی رباتها از قوانین آسیموف منجر به اتفاقات اصلی داستان می شود. پس میتوان گفت این قوانین کاملا غیر کاربردی هستند”.
انواع رباتهای مدرن
رباتهای متحرک
رباتهای متحرک میتوانند در محیط اطرافشان حرکت کنند و به یک موقعیت مکانی مشخص محدود نیستند. بهعنوان مثالی از یک ربات متحرک میتوان به ارابه یا ربات های حمل و نقل خود راهنما (AGVs) اشاره کرد. AGV یک ربات متحرک به شمار میرود که علامت ها و یا سیم های بر روی کف زمین را دنبال می کند و یا با کمک دید خود و یا استفاده از لیرزها، از نقطه ای به نقطه دیگر جابجا می شود. AGV ها در ادامه مطلب به طور گسترده تری مورد بررسی قرار میگیرند.

نمونه ای از ربات های متحرک مشهور به ارابه یا ربات های حمل و نقل خود راهنما – AVGs
رباتهای متحرک در محیط های صنعتی، نظامی و امنیتی مورداستفاده قرار میگیرند. همچنین در بعضی موارد از این رباتها بهعنوان کالای مصرفی و به منظور سرگرمی یا انجام دادن کارهایی مشخص مانند جارو کردن خانه نیز استفاده می شود. رباتهای متحرک موضوع اصلی بسیاری از تحقیقاتی هستند که در حال حاضر در زمینه رباتیک در حال انجام است و تقریباً هر دانشگاه بزرگی، یک یا دو آزمایشگاه را به تحقیق بر روی رباتهای متحرک اختصاص داده است.
رباتهای متحرک اغلب در محیط هایی که کنترل دقیقی بر روی آنها صورت میگیرد، مثلا در خطوط مونتاژ، مورداستفاده قرار میگیرند زیرا این رباتها در واکنش نشان دادن به دخالت های غیر منتظره مشکل خواهند داشت. به همین دلیل نیز انسانها به ندرت با این گونه رباتها روبرو میشوند. با این وجود، رباتهای خانگی که برای تمیز کردن و نگهداری منزل به کار می روند در بسیاری از کشور های توسعه یافته متداول هستند. از رباتهای متحرک در کاربردهای نظامی نیز استفاده می شود.
رباتهای صنعتی
رباتهای صنعتی اغلب از یک بازوی مفصل دار( بازوی مکانیکی چند قسمتی) و بخش انتهایی آن که به یک سطح ثابت متصل می شود، تشکیل شدهاند. یکی از متداول ترین انواع بخش انتهایی، گیره ها هستند.
سازمان بین المللی استانداردسازی تعریف ربات صنعتی(بازوی مکانیکی) را در استاندارد ISO 8373 به شرح زیر تعریف کرده است:
“یک بازوی مکانیکی با کنترل خودکار، قابل برنامه ریزی و چندکاره که میتوان آن را در سه محور مختلف(یا بیشتر) برنامه ریزی کرد. این ربات میتواند بهصورت ثابت در محل و یا متحرک، در کاربردهای اتوماسیون صنعتی مورداستفاده قرار بگیرد.”
این تعریف توسط فدراسیون بین المللی رباتیک، شبکه تحقیقات رباتیک اروپا (Euron) و بسیاری از کمیته های استاندارد کشور های مختلف مورد قبول واقع شده است.
رباتهای خدماتی
بیشتر رباتهای صنعتی و بازو های مکانیکی بهصورت ثابت هستند و به منظور تولید و توزیع کالا ها مورداستفاده قرار میگیرند. اما واژه “رباتهای خدماتی” به خوبی رباتهای صنعتی تعریف نشده است. فدراسیون بین المللی رباتیک، تعریف اولیه ای را برای این گونه رباتهای مشخص کرده است:” یک ربات خدماتی، رباتی است که برای ارائه خدماتی که رفاه انسانها و تجهیزات مفید است، بهصورت نیمه یا تمام خودگردان عمل می کند. این ربات در فعالیت های تولیدی شرکت نمی کند.”

نمونه ای از یک ربات خدماتی مشهور به TWENDY-ONE
رباتهای آموزشی
میتوان از رباتها بهعنوان وسایل کمک آموزشی برای معلمان استفاده کرد. از دهه 1980، رباتهایی به شکل لاک پشت در مدارس مورداستفاده قرار می گرفتند و دانش آموزان با استفاده از زبان برنامهنویسی لوگو، آنها را برنامه ریزی میکردند.
امروزه کیت های رباتی مانند Lego Mindstorms NXT، BIOLOID، OLLO و یا رباتهای آموزشی شرکت BotBrain در بازار موجود هستند. این کیت ها به کودکان کمک می کنند تا در مورد ریاضی، فیزیک، برنامهنویسی و الکترونیک چیز های مختلفی یاد بگیرند. رباتها حتی از طریق مسابقات رباتیک، وارد زندگی دانش آموزان مقاطع ابتدایی و دبیرستان نیز شده است و هر ساله مسابقات مختلفی در سرتاسر جهان برگزار می شود.

کیت رباتیLego Mindstorms NXT از سری ربات های آموزشی
البته دستگاههایی نیز وجود دارند که به شکل ربات طراحی شدهاند که بهعنوان نمونه میتوان به کامپیوتر معلم به نام Leachim و یا 2-XL که یک اسباب بازی آموزشی به شکل ربات است اشاره کرد. هر دو این وسایل توسط Michael J. Freeman ساختهشدهاند.
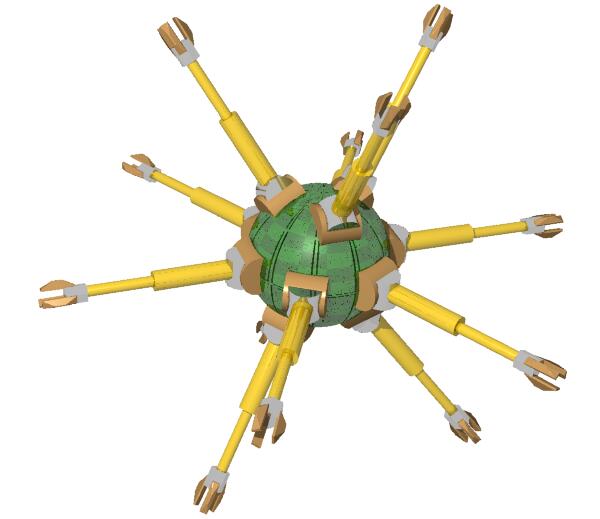
رباتهای ماژولار (تکه ای)
رباتهای ماژولار، نسل جدیدی از رباتها هستند که قرار است با تکه ای کردن ساختار رباتها، موارد کاربرد آنها را بیشتر کنند. بهبود عملکرد و بازده رباتهای ماژولار نسبت به رباتهای معمولی آسان تر است. این رباتها از یک نوع ماژول (تکه) مشابه یا چند نوع ماژول مختلف و یا ماژول های شبیه به هم که اندازه آنها با هم متفاوت است، ساخته میشوند. ساختار این رباتها باعث می شود تا امکان تغییر شکل های زیادی داشته باشند. در واقع میتوان رباتهای ماژولار را با بیش از 8 درجه آزادی نیز طراحی کرد. با این وجود، برنامهنویسی و سینماتیک و دینامیک معکوس برای این دسته از رباتها نسبت به رباتهای معمولی پیچیده تر است.
رباتهای ماژولار ممکن است از ماژول های L شکل، ماژول های مکعبی، ماژول های H شکل و ماژول های U شکل تشکیل شوند. فناوری ANAT که اولین فناوری مخصوص برای ساخت رباتهای ماژولار است و توسط شرکت Robotics Design طراحی شده، امکان ساخت رباتهای ماژولار با ماژول های H و U شکل را فراهم می کند به طوری که این ماژول ها در زنجیره هایی به یکدیگر متصل هستند. از چنین سیستمی برای ساخت رباتهای ماژولار با شکل های همگن و یا غیرهمگن استفاده می شود.

نمونه ای از ربات ماژولار
رباتهای ساختهشده با فناوری ANAT را میتوان با n درجه آزادی در نظر گرفت زیرا در این سیستم هر ماژول، یک سیستم رباتیک متحرک کامل است که به راحتی در برابر حرکت ماژول های قبل و بعد از خود در زنجیره، حرکت می کند و جابجا می شود. در نتیجه هر یک ماژول، امکان داشتن یک درجه آزادی را فراهم می کند. بنابراین، هرچقدر ماژول هایی بیشتری به یکدیگر متصل باشند، مجموعه آنها درجه آزادی بیشتری خواهد داشت. ماژول های L شکل را نیز میتوان بهصورت زنجیره ای در آورد، البته با افزایش اندازه زنجیره، اندازه ماژول ها باید به ناچار کمتر شود زیرا در غیر این صورت، با اضافه شدن باری که به دو انتهای زنجیره وارد می شود، کرنش وارد بر ماژول هایی که در وسط زنجیره هستند افزایش می یابد.
رباتهای ANAT با ماژول های H شکل از این مشکل رنج نمیبرند زیرا طراحی آنها بهگونهای است که به ربات اجازه می دهد تا فشار و ضربهی وارده را به طور یکنواخت در سرتاسر ماژول ها پخش کند و در نتیجه با افزایش طول ربات، ظرفیت باربری آن کاهش نمی یابد. رباتهای ماژولار را میتوان بهصورت دستی و یا خودکار مجددا تغییر شکل داد تا به رباتی دیگر تبدیل شود. در این فرآیند حتی ممکن است کاربرد ربات نیز عوض شود. به دلیل اینکه رباتهای ماژولار با ساختار مشابه، از ماژول هایی تشکیل شدهاند که برای رباتهای مختلف استفاده میشوند، میتوان یک ربات ماژولار به شکل مار را با رباتی مشابه ترکیب کرد تا یک ربات چند بازویی به دست آورد، یا حتی میتوان آن را به رباتهای کوچک تری تقسیم کرد که هر کدامشان باز هم میتوانند به رباتهای کوچکتری تقسیم شوند. این قابلیت به یک ربات ماژولار اجازه می دهد در یک وظیفه مشخص، بهصورت کاملا تخصصی عمل کند یا توانایی انجام چند وظیفه مختلف را به طور همزمان داشته باشد.
فنّاوری رباتهای ماژولار امروزه در حمل و نقل هیبریدی، اتوماسیون صنعتی، نظافت و تعمیر کانال های تهویه هوا مورداستفاده قرار میگیرد. بسیاری از مراکز تحقیقاتی و دانشگاه ها نیز بر روی این فنّاوری تحقیق کردهاند و حتی توانسته اند نمونه های اولیه موفقی را نیز بسازند.
رباتهای مشارکتی
رباتهای مشارکتی یا همکار که به آنها کوبات نیز گفته می شود، رباتهایی هستند که میتوانند در حین انجام مسئولیتهای صنعتی ساده، بهصورت ایمن و موثر با کارگران تعامل داشته باشند. با این وجود بازوهای ربات و سایر شرایط محیطی در کارگاه ممکن است باعث ایجاد حوادثی شوند؛ در نتیجه لازم است تا قبل از از هرگونه استفاده واقعی، تحلیل خطرات احتمالی انجام شود.
رباتهای مشارکتی که امروزه در صنعت مورداستفاده قرار میگیرند عمدتاً ساخت شرکت Universal Robots در کشور دانمارک هستند.
شرکت Rethink Robotics که توسط Rodney Brooks تاسیس شده، در سپتامبر سال 2012 رباتی به نام Baxter را معرفی کرد. این ربات، یک ربات صنعتی است که بهگونهای طراحی شده تا بتواند با سایر کارگران در محیط کارگاه، به طور ایمن تعامل داشته باشد و بتوان آن را برای انجام کار های ساده برنامه ریزی کرد.
رباتهای Baxter در صورتی که انسانی در مسیر بازو های رباتیک آنها قرار داشته باشد متوقف میشوند و همچنین کلید های مخصوص خاموش کردن ربات نیز بهصورت برجسته بر روی بدنه آنها نصب شده است. این رباتها که با هدف فروش به کسب و کار های کوچک ساختهشدهاند، بهعنوان معادل رباتیک یک کامپیوتر شخصی تلقی میشوند. تا ماه مِی 2014، 190 شرکت در ایالاتمتحده رباتهای Baxter را خریداری کردهاند و این رباتها در بریتانیا نیز بهصورت تجاری مورداستفاده قرار میگیرند.
رباتها در جامعه
تقریباً نصف رباتهای جهان در قاره آسیا، 32 درصد در اروپا، 16 درصد در آمریکای شمالی، 1 درصد در استرالیا و 1 درصد نیز در آفریقا هستند. 40 درصد تمام رباتهای جهان در کشور ژاپن هستند که این کشور را به بزرگترین کشور از نظر تعداد رباتها تبدیل می کند.
استقلال رباتها و سوالات اخلاقی مطرحشده
با پیشرفته تر شدن رباتها، این سوال که چه قوانین اخلاقی میتواند رفتار آنها کنترل کند توسط متخصصان و دانشگاهیان متعددی بررسی شده است. سوال دیگری که در این زمینه مطرح است این است که آیا رباتها میتوانند داشتن هر نوع حق اجتماعی، فرهنگی، اخلاقی یا حقوقی را ادعا کنند یا خیر. یک تیم از دانشمندان اعلام کرده که ممکن است تا سال 2019، مغز رباتیک ساخته شود. عده ای دیگر پیش بینی می کنند هوش رباتیک تا سال 2050 به طرز چشمگیری گسترش خواهد یافت. پیشرفت های اخیر، رفتار رباتها را بسیار پیچیده تر از قبل کرده است. تاثیر اجتماعی رباتهای هوشمند موضوع مستندی به نام Plug & Pray محصول سال 2010 میلادی است. Vernor Vinge
(متخصص و رمان نویس آمریکایی) اعلام کرده ممکن است زمانی برسد که کامپیوتر ها و رباتها از انسان باهوش تر شوند. او این پدیده را تکینگی فناوری نامیده است. او همچنین معتقد است این پدیده میتواند برای انسانها تا حدودی یا حتی به مقدار زیادی خطرناک باشد. عواقب احتمالی و راهکار مناسب برای این پدیده در مکتبی که به نام سینگولاریتاریانیسم (Singularitarianism) شناخته می شود، مورد بحث و بررسی قرار میگیرد.
در سال 2009، متخصصان در کنفرانسی به میزبانی انجمن پیشبرد هوش مصنوعی (AAAI) شرکت کردند و در مورد اینکه آیا ممکن است رباتها بتوانند هرگونه استقلالی به دست بیاورند و در صورت استقلال آنها، این امر چقدر میتواند برای انسانها تهدید یا خطر به شمار رود، بحث و گفتگو کردند. آنها به این مطلب اشاره کردند که برخی از رباتها توانسته اند به شکل های مختلفی از نیمه استقلال برسند. برای مثال بعضی از رباتها میتوانند خودشان منبع انرژی را پیدا کنند و یا به طور کاملا مستقل، از بین دشمنان، اهدافی را انتخاب کرده و با استفاده از سلاح هایشان به آنها حمله کنند. آنها همچنین به این مطلب اشاره کردند که برخی از ویروس های کامپیوتری میتوانند در مقابل پاک سازی مقاومت کنند و به درجه “هوش سوسک ها” رسیده اند. البته دستیابی ربات خودآگاهی کامل، یعنی مشابه آنچه در بسیاری از کتاب ها و فیلم های علمی-تخیلی دیده می شود، محتمل نیست، اما خطرات و مشکلات احتمالی دیگری وجود دارد. منابع رسانه ای و گروه های علمی مختلفی به روند تغییرات مشابهی در بخش های مختلف رباتیک اشاره کردهاند که در کنار هم ممکن است منجر به افزایش کاربردهای رباتها و خودگردانی و استقلال آنها شود که طبیعتا نگرانیهایی را نیز در بر خواهد داشت. در سال 2015، نشان داده شد که رباتهای Nao alderen توانایی داشتن درجه ای از خودآگاهی را نیز دارند. محققین آزمایشگاه هوش مصنوعی و منطق موسسه پلی تکنیک Rensselaer در نیویورک، آزمایشی را انجام دادند که در آن ربات به خودآگاهی رسید؛ و وقتی این اتفاق افتاد ربات جواب قبلی خود به یک سوال مشخص را اصلاح کرد.
رباتهای نظامی
بعضی از متخصصان و اعضای جامعه دانشگاهی، استفاده از رباتها برای نبرد نظامی، بهخصوص زمانی که دارای قابلیتهای خودگردانی و استقلال نسبی باشند را زیرسوال برده اند. همچنین نگرانیهایی نیز در مورد فناوری که امکان کنترل رباتهای مسلح را توسط رباتهای دیگر فراهم می کند وجود دارد. نیروی دریایی ایالاتمتحده، با بودجه خود گزارشی را تهیه کرده که می گوید با پیچیده تر شدن و پیشرفت رباتهای نظامی، باید به پیامد های تصمیم گیری آنها بهصورت مستقل، توجه بیشتری شود. یکی از محققان اعلام کرده که رباتهای خودگردان میتوانند رفتار انسانی تری داشته باشند زیرا میتوانند به طور موثری تصمیم گیری کنند اما سایر متخصصان این مطلب را قبول ندارند.
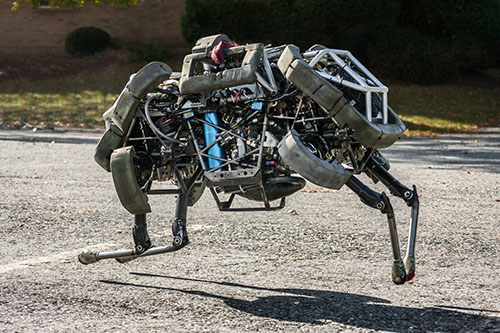
در سال 2012، ربات چهارپای نظامی Cheetah که نسخه تکامل یافته BigDog می باشد با شکستن رکورد ربات دوپایی MIT که مربوط به سال 1989 بود بهعنوان سریع ترین ربات دنیا شناخته شد.
رباتی که نگرانی های عمومی زیادی را در این زمینه ایجاد کرده است EATR نام دارد. این ربات میتواند سوخت مورد نیاز خود را به طور پیوسته و با استفاده از مواد آلی تامین کند. موتور EATR بهگونهای طراحی شده تا با استفاده از بیومَس و پوشش گیاهی که به طور مشخص توسط سنسورهایش انتخاب می شود کار کند. ربات میتواند این مواد را در میدان جنگ و یا در محل های دیگر پیدا کند. البته مسئولین پروژه اعلام کردهاند که این ربات میتواند از چربی مرغ نیز بهعنوان سوخت استفاده کند.
Manuel De Landa، نویسنده و فیلسوف آمریکایی معتقد است موشک های هوشمند و بمب های خودگردان که به درک مصنوعی مجهز هستند نیز میتوانند بهعنوان ربات تلقی شوند زیرا میتوانند به در بعضی موارد بهصورت مستقل تصمیم بگیرند. او معتقد است این کار، روندی مهم و بسیار خطرناک است که در آن انسانها، مسئولیت اتخاذ تصمیم های مهم را به ماشینها واگذار می کنند.
ارتباط ربات ها با بیکاری
قرن هاست که متخصصین پیش بینی کردهاند، ماشینها، کارگران را کنار خواهند گذاشت و باعث افزایش بیکاری میشوند.
بهعنوان مثالی جدید، در سال 2011، شرکت تایوانی Foxconn که در عرصه فنّاوری فعالیت می کند اعلام کرد قصد دارد در طی طرحی سه ساله، رباتها بیشتری را جایگزین انسانها کند. در حال حاضر این شرکت از ده هزار ربات استفاده می کند اما در انتهای این طرح سه ساله، تعداد این رباتها به یک میلیون افزایش خواهد یافت.
حقوق دانان معتقدند رواج استفاده از رباتها در محل های کار، نیاز به بازبینی قوانین مربوط به تعدیل نیرو را افزایش خواهد داد. Kevin J. Delaney در این رابطه می گوید:” رباتها در حال گرفتن شغل انسانها هستند. بیل گیتس معتقد است دولت ها باید از شرکت هایی که از ربات استفاده می کنند، مالیات ویژه ای بگیرد تا با این کار، حداقل سرعت گسترش اتوماسیون کاهش یابد و همچنین بودجه لازم برای ایجاد شغل های دیگر تامین شود.”
از مالیات استفاده از ربات میتوان برای پرداخت حداقل حقوق تصویب شده در قانون به کارگرانی که کار خود را از دست دادهاند نیز استفاده کرد.
کاربردهای فعلی ربات
در حال حاضر، دو نوع اصلی از رباتها وجود دارند که بر اساس مورد کاربردشان طبقه بندی شدهاند: رباتهای خودگردان با کاربرد عمومی و رباتهای با کاربرد مخصوص.
رباتها را میتوان از منظر تخصصی بودن کاربرد آنها طبقه بندی کرد. یک ربات میتواند بهگونهای طراحی شود تا بتواند یک وظیفه مشخص را به طرز فوقالعادهای انجام دهد و یا تعدادی وظیفه را با کیفیت کمتری نسبت به حالت قبل انجام دهد. البته، همه رباتها بهصورت ذاتی میتوانند به طور مجدد برنامه ریزی شوند تا رفتار متفاوتی از خود نشان دهند؛ اما در بسیاری از موارد، توانایی آنها در انجام دادن مسئولیتهای مختلف به دلیل شکل فیزیکی آنها محدود می شود. برای مثال، یک ربات کارخانه ای میتواند کار هایی مانند برش، جوش کاری، چسب کاری انجام دهد و یا از آن بهعنوان سواری در داخل کارخانه استفاده کرد در حالی که رباتی که مخصوص برداشتن چیزی از کنار خود و قرار دادنش در جای دیگر است تنها میتواند برد های الکترونیکی چاپ شده را در جای مشخصی قرار دهد.
رباتهای خودگردان با کاربرد عمومی
رباتهای خودگردان یا خودمختار با کاربرد عمومی میتوانند کار های مختلفی را بهصورت مستقل انجام دهند. این رباتها اغلب میتوانند در محیط های آشنا به طور مستقل از دیگران، جابجا شوند، نیاز های شارژ مجدد خود را بر طرف کنند، از در های الکترونیکی و آسانسور ها استفاده کنند و کار های ساده دیگری مشابه این ها را انجام دهند. مانند کامپیوتر ها، رباتهای عمومی نیز میتوانند به شبکه ها، نرم افزار و لوازم جانبی که مفید بودن آنها را افزایش می دهد متصل شوند. آنها میتوانند افراد یا اشیا مختلف را بشناسند، صحبت کنند، با کارگران همدم شوند، کیفیت محیط کارگاه را کنترل کنند، به هشدار های خطر واکنش نشان دهند، اشیا مختلف را جابجا کنند و کار های مفید دیگری مانند این ها را انجام دهند.
رباتهای با کاربرد عمومی، ممکن است چند کار را به طور همزمان انجام دهند یا ممکن است در طول روز، مسئولیتهای مختلفی را بر عهده بگیرند. برخی از این رباتها، سعی می کنند از انسانها تقلید کنند و ممکن است از نظر ظاهری نیز شبیه به انسان باشند. به این گونه رباتها، رباتهای انساننما گفته می شود. رباتهای انساننما هنوز در مراحل اولیه هستند بهعنوان مثال، تا این لحظه، هیچ ربات انساننمایی نمیتواند در داخل اتاقی که تا به حال در آن نبوده، حرکت کند و جابجا شود. بنابراین، با وجود رفتار هوشمندانه آنها در محیط هایی که با آنها کاملا آشنا هستند ، رباتهای انساننما هنوز تواناییهای بسیار محدودی دارند.

ربات مشهور به Knightscope یک ربات با کاربرد عمومی می باشد که در طول روز بهعنوان راهنما و شبها به عنوان نیروی امنیتی عمل می کند
رباتهای کارخانه ای
ربات ها در صنعت خودروسازی خودروسازی
در سه دهه گذشته، رباتها کارخانه های خودروسازی را به تسخیر خود درآوردهاند. یک کارخانه خودروسازی معمولی از صد ها ربات صنعتی تشکیل شده است که بر روی خطوط تولید تمام اتوماتیک کار می کنند. این رباتها کار 10 نفر را انجام میدهند. در یک خط تولید اتوماتیک، شاسی ماشین بر روی نوار نقاله قرار میگیرد و توسط رباتهای مختلف، جوشکاری، چسب کاری، رنگ پاشی و در نهایت مونتاژ می شود.

ربات جوشکار مفصل دار در یک کارخانه – یکی از اتواع رباتهای صنعتی
ربات ها در بسته بندی
همچنین از رباتهای صنعتی برای انبار کردن و بسته بندی کالا های تولید شده استفاده می شود. برای نمونه یک ربات کارتن های نوشیدنی را از انتهای نوار نقاله بر می دارد و آنها را به طور مرتب در جعبه هایی می چیند.
الکترونیک
برد های الکترونیک چاپی (PCB) تقریبا به صورت انحصاری توسط ربات ها تولید می شوند. این کار با بازوهای رباتیک SCARA انجام می گیرد که اجزای کوچک الکترونیکی را از نوار هایی جدا می کنند و با دقت بسیار زیاد بر روی برد نصب می کنند. چنین ربات هایی می توانند در یک ساعت صد ها هزار جز را در جای خود قرار دهند و در نتیجه عملکرد بسیار بهتری از نظر سرعت، دقت و قابل اطمینان بودن نسبت به انسان دارند.
ارابه ها و وسایل نقلیه خود راهنما (AGVs)
این رباتها از خانواده رباتهای متحرک هستند و با دنبال کردن علامت ها یا سیم های بر روی زمین و یا از طریق دید مصنوعی و لیزر، جابجا میشوند. این رباتها برای حمل کالا ها در تاسیسات بزرگ مانند انبار ها و بنادر و یا بیمارستآنها استفاده میشوند.
وسایل نقلیه یا ارابه های خود راهنمای اولیه
این دسته از رباتها، تنها توانایی انجام کارهایی را داشتند که میشد آنها را به طور دقیق تعریف کرد یا روش انجام آنها در دفعات مختلف، کاملا یکسان بود. این گونه رباتها به بازخورد و هوش کمی احتیاج داشتند و تنها از سنسورهای بسیار ساده ای استفاده میکردند. محدودیت این نوع AGV ها این بود که نمیشد به راحتی مسیر آنها را تغییر داد و خود آنها هم نمیتوانستند در صورت مواجه با مانع، مسیر خود را تغییر دهند. بنابراین، در صورتی که یک AGV در مسیر خراب میشد، کل عملیات باید به ناچار متوقف میشد.
ارابه های خود راهنمای معمولی
این رباتها به منظور مثلث سازی علامت ها و یا بارکد های موجود بر روی سقف یا کف محیط ساختهشدهاند. در بیشتر کارخانه ها، سیستمهای مثلث سازی، به نگهداری نسبتا زیادی نیاز دارند. برای مثال، علامت ها و بارکد ها باید هر روز تمیز شوند. همچنین اگر چیزی مانع دید رباتها نسبت به علامت ها شود، یا بارکد ها مخدوش شوند AGV ها ممکن است گم شوند. اغلب از این AGV ها در محیط هایی که کارگر انسانی وجود ندارد، استفاده می شود.
ارابه های خود راهنمای هوشمند
رباتهایی مانند SmartLoader، SpeciMinder، ADAM، Tug، Eskorta و MT 400 برای محیط های کاری که انسان نیز در آن وجود دارد طراحی شدهاند. آنها با شناسایی ویژگی های محیطی جابجا میشوند. اسکنر های سه بعدی یا سایر روشهای تشخیص محیط بهصورت دو بعدی یا سه بعدی، به حذف خطاهای تجمعی، در محاسبات مربوط به ناوبری کور، در موقعیت فعلی AGV ها کمک می کنند. برخی از AGV ها میتوانند با استفاده از لیزر و یا با استفاده از مکان یابی و نقشه برداری همزمان(SLAM)، نقشه هایی از محیط اطرافشان تهیه کنند و از این نقشه ها در کنار سایر الگوریتم های برنامه ریزی مسیر و جلوگیری از برخورد با موانع برای طراحی مسیر بهینه استفاده کنند. این دسته از AGV ها قادرند در محیط های پیچیده فعالیت کنند و کار های غیرتکراری و غیر متوالی مختلفی مانند جابجایی فتوماسک ها در آزمایشگاه های نیمه رسانا، نمونه های مختلف در بیمارستآنها و کالا های مختلف در انبار ها را انجام دهند. برای محیط های پویا تر، مثلا انبار هایی که پر از پالت های مختلف کالا هستند، AGV های به استراتژی های بهتری، مثلا استفاده از سنسورهای سه بعدی مانند دوربین های مدت پرواز(ToF) یا دوربین های استریوویژن، نیاز دارند تا بتوانند مسیر خود را در محیط پیدا کنند.
کار های کثیف، خطرناک، خسته کننده و یا غیرقابل دسترسی
کار های بسیار زیادی وجود دارند که انسانها ترجیح میدهند تا آنها را به رباتها واگذار کنند. این کار ها ممکن است مانند تمیز کردن خانه کسل کننده باشند یا مانند بررسی قسمت های داخلی یک آتشفشان، خطرناک باشند. کار های دیگری هم وجود دارند که برای انسان از نظر فیزیکی قابل دسترسی نیستند که برای مثال میتوان به اکتشاف یک سیاره دیگر، تمیز کردن داخل یک لوله بلند و یا انجام جراحی لاپاراسکوپی اشاره کرد.
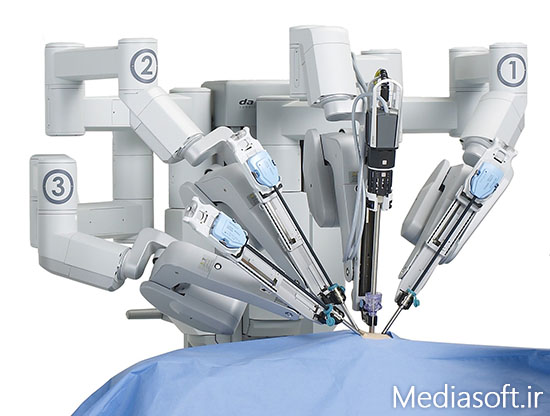
یک ربات جراحی لاپاراسکوپی
کاوشگر های فضایی
تقریباً همه کاوشگر های فضایی بدون سرنشینی که تاکنون به فضا پرتاب شدهاند، ربات بوده اند. برخی از آنها در دهه 60 میلادی و با قابلیتهای بسیار محدود به فضا پرتاب شدند اما توانایی آنها در پرواز و فرود آمدن(مثل Luna 9) آنها را در دسته رباتها قرار می دهد. کاوشگر های دیگر مانند Voyager ها و کاوشگر های Galileo نیز در این دسته قرار میگیرند.
تله رباتها
رباتهای کنترل از راه دور یا تله رباتها، دستگاههایی هستند که بهجای اینکه از چند حرکت از پیش تعیین شده استفاده کنند، از فاصله دور توسط یک اپراتور انسانی کنترل میشوند اما رفتاری نیمه خودگردان دارند. از این رباتها زمانی استفاده می شود که به دلیل خطرناک بودن، دور بودن و یا غیرقابل دسترس بودن، انسان نمیتواند در محل پروژه حاضر باشد. ربات میتواند در یک اتاق دیگر و یا در یک کشور دیگر باشد و یا ممکن است مقیاس عملکرد ربات با انسان بسیار متفاوت باشد.
مثلا یک ربات مخصوص برای جراحی لاپاراسکوپی، به جراح اجازه می دهد تا در مقیاس بسیار کوچک تر از جراحی باز، به اعضای بدن بیمار دسترسی پیدا کند که این امر باعث می شود تا دوران نقاهت بعد از عمل به شدت کاهش یابد. همچنین به منظور جلوگیری از به خطر افتادن کارگران در محیط های خطرناک و تنگ، مثلا به منظور تمیز کردن کانال های تهویه هوا، معمولا از این دسته از رباتها برای این کار استفاده می شود. زمانی که قرار است یک بمب خنثی شود، اپراتور از یک ربات کوچک برای خنثی کردن آن استفاده می کند. چندین نویسنده از دستگاهی به نام Longpen برای امضا کردن کتاب هایشان از راه دور استفاده کردهاند.
استفاده از هواپیما های رباتی کنترل از راه دور مانند پهباد های شکارچی (UAV ) در امور نظامی نیز بسیار متداول است. این پهباد های بدون خلبان، میتوانند سطح زمین را جستجو کنند و به اهداف مختلف شلیک کنند. صدها ربات مانند Packbot مربوط به شرکت iRobot و یا TALON ساخت شرکت Foster-Miller، توسط ارتش آمریکا برای خنثی کردن بمب های کنار جاده ای در عراق و افغانستان مورداستفاده قرار گرفته اند.
ماشینهای خودکار برداشت محصول
از رباتها به منظور برداشت میوه در باغ ها با هزینه ای کمتر نسبت به نیروی انسانی، استفاده می شود.
رباتهای خانگی
رباتهای خانگی، رباتهای ساده ای هستند که برای انجام یک کار مشخص در خانه استفاده میشوند. از آنها برای انجام کارهای ساده ولی خسته کننده برای انسانها، مثلا جارو کشیدن، تمیز کردن کف اتاق و یا زدن چمن ها استفاده می شود. از جمله رباتهای خانگی میتوان به Roomba اشاره کرد.
رباتهای نظامی
رباتهای نظامی شامل ربات SWORDS ساخته شرکت Foster-Miller است که امروزه در نبرد های زمینی مورداستفاده قرار میگیرد. این ربات میتواند از اسلحه های مختلفی استفاده کند. همچنین در حال حاضر صحبت هایی نیز در مورد دادن درجه ای از خودگردانی به این ربات در شرایط جنگی مطرحشده است. پهباد های جنگی (UCAV)، نوعی پهباد (UAV) هستند که قادر به حمل مهمات جنگی می باشند. این پهبادها توانایی انجام ماموریت های مختلفی از قبیل نبرد هوا به زمین، دارند. در حال حاضر، UCAV هایی در حال طراحی و ساخت هستند که میتوانند بهصورت خودگردان پرواز کرده و مسیر و هدفشان را انتخاب کنند و بیشتر تصمیم های ضروری را بهصورت مستقل، اتخاذ کنند. بهعنوان نمونه از این دسته از رباتها میتوان به BAE Taranis ساخت بریتانیا اشاره کرد که میتواند بدون نیاز به خلبان، بر روی قاره های مختلف پرواز کند و از ابزار های جدیدی برای جلوگیری از شناسایی شدن بهره می برد. پرواز های آزمایشی این پهباد نظامی از سال 2011 آغاز شده است.
انجمن پیشبرد هوش مصنوعی(AAAI) این موضوع را با جزئیات فراوان بررسی کرده است و رئیس این انجمن، تحقیق جدیدی را برای بررسی های بیشتر در این زمینه تصویب کرده است.

ربات SWORDS ساخته شرکت Foster-Miller
برخی از متخصصان پیشنهاد کردهاند تا هوش های مصنوعی بشر دوستانه ساخته شوند. یعنی پیشرفت هایی که در حال حاضر در زمینه هوش مصنوعی در حال رخ دادن است باید شامل تلاش هایی باشد که در آن هوش های مصنوعی بهصورت ذاتی، بشر دوستانه و انسانی برخورد کنند. در این زمینه اقداماتی نیز انجام گرفته است و کشور هایی مانند ژاپن و کره جنوبی که از رباتها به طور گسترده استفاده می کنند، شروع به تصویب قوانینی کردهاند که رباتها را ملزم به داشتن سیستمهای ایمنی و مجموعه قوانینی شبیه به سه قانون اصلی رباتیک که توسط آسیموف ارائه شده بود، می کند.در این زمینه، یک گزارش رسمی توسط کمیته سیاست گذاری صنایع رباتیک دولت ژاپن در سال 2009 منتشر شد. مقامات و محققان چینی نیز گزارشی را منتشر کردهاند که در آن مجموعه قوانین اخلاقی جدید و مجموعه دستورالعمل هایی به نام “مطالعات قانونی ربات” پیشنهاد شده است. اخیرا، نگرانیهایی در رابطه با توانایی دروغگویی رباتها در مواجهه با سوالات مختلف، به وجود آمده است.
رباتهای معدنی
رباتهای معدنی، بهگونهای طراحی شدهاند تا بتوانند برخی از مشکلاتی را که صنعت معدن در حال حاضر با آنها دست و پنجه نرم می کند، حل کنند. این مشکلات شامل کمبود مهارت، افزایش بهره وری با وجود کاهش عیار مواد معدنی و دست یابی به اهداف زیست محیطی است. به دلیل ماهیت خطرناک معدن کاری،بهخصوص معدن کاری زیرزمینی، استفاده از رباتهای خودگردان، نیمه خودگردان و کنترل از راه دور در چند سال اخیر به شدت گسترش یافته است.
برخی از تولید کنندگان وسایل نقلیه، قطار ها، کامیون ها و لودر های خودگردانی را ارائه می کنند که میتواند بدون دخالت انسان، مواد معدنی را بارگیری کرده، آنها را از محل معدن به مقصد منتقل کند و در آنجا آنها را تخلیه کند. یکی از بزرگترین شرکت های معدنی دنیا به نام Rio Tinto اخیرا ناوگان کامیون های خودگردان خود را به بزرگترین ناوگان معدنی خودگردان جهان تبدیل کرده است. این ناوگان شامل 150 کامیون خودگردان ساخت شرکت Komatsu است و در بخش غربی استرالیا فعالیت می کند. به طور مشابه، شرکت BHP نیز گسترش ناوگان دستگاههای حفاری خودگردان خود به بزرگترین ناوگان دستگاههای حفاری خودگردان تایید کرده است. در این ناوگان از 21 دستگاه حفاری خودگردان ساخت شرکت Atlas Capco استفاده شده است.
در حال حاضر دستگاههای حفاری، دستگاههای جبهه کار طولانی و دستگاههای سنگ شکن بهصورت رباتهای خودگردان موجود هستند. سیستم کنترل دکل حفاری، محصول شرکت Atlas Capco میتواند بهصورت خودکار برنامه حفاری را بر روی یک دکل حفاری اجرا کند. در این سیستم، دستگاه با استفاده از GPS به محل مورد نظر منتقل می شود، دکل حفاری آماده می شود و عملیات حفاری تا عمق مورد نظر انجام میگیرد. به طور مشابه، سیستم Rocklogic که توسط شرکت Transmin ساختهشده، میتواند بهصورت خودکار مسیر سنگ شکن را تا رسیدن مقصد مورد نظر انتخاب کند. چنین سیستمهایی ایمنی و بازدهی عملیات معدنکاری را به طرز چشمگیری افزایش میدهند.
رباتهای سلامتی
رباتهایی که در زمینه سلامتی فعالیت می کنند دو کاربرد عمده دارند. یک دسته از این رباتها به افراد با بیماری های مختلف، مثلا مبتلایان به ام اس کمک می کنند و دسته ای دیگر، به زیرمجموعه های سیستمهای بهداشتی و سلامتی مثلا بیمارستآنها و داروخانه ها کمک می کنند.
اتوماسیون خانگی برای افراد مسن و یا معلول
رباتهایی که در اتوماسیون خانگی مورداستفاده قرار میگیرند در طول زمان، از دستیار های ساده ای مانند Handy 1 به رباتهای نیمه خودگردان پیشرفته ای مانند FRIEND تبدیل شدهاند که میتواند افراد مسن یا معلول را در انجام کارهای روزمره شان کمک کند.
امروزه، سن متوسط جمعیت در بسیاری از کشور ها، بهخصوص در ژاپن در حال افزایش است. معنای این نکته این است تعداد افراد مسنی که به مراقبت احتیاج دارند در حال زیاد شدن است اما تعداد افراد جوان که برای مراقبت از آنها لازم است به نسبت کمتر است. انسانها همواره نقش بهترین مراقبت کننده را بازی خواهند کرد اما در صورتی که انسانها در دسترس نباشند، این رباتها هستند که به طور تدریجی این مسئولیت را به عهده خواهند گرفت.
FRIEND یک ربات نیمه خودگردان است که برای کمک به افراد مسن و معلول در انجام کار های روزانه شان، مثلا درست کردن غذا و سرو آن، طراحی شده است. FRIEND برای بیمارانی که از پاراپلژی(ناتوانی کامل پا و تنه در حرکت) رنج می رند، دچار بیماری های عضلانی هستند و یا به دلیل سکته و موارد دیگر دچار فلج کامل عضلات شدهاند کمک می کند تا بدون نیاز به پرستار، بتوانند کارهای مختلفی را انجام دهند.

یک نمونه از ربات های پیشرفته مشهور به Friend
داروخانه ها
شرکت Script Pro رباتی را تولید کرده که به داروخانه ها کمک می کند تا نسخه هایی را که شامل جامدات خوراکی یا قرص های دارویی مختلف هستند، بپیچند.
داروساز یا تکنیسین داروخانه، اطلاعات نسخه را در سیستم اطلاعات داروخانه وارد می کند. سیستم با مشخص کردن اینکه آیا دارو های ذکر شده در داخل ربات موجود هستند یا خیر، اطلاعات را به ربات می فرستد تا نسخه را بپیچد. این ربات سه ظرف مخصوص دارو با اندازه های مخصوص برای پر کردن دارد که اندازه آنها از اندازه قرص ها تبعیت می کند. زمانی که موجودی دارو های داخل ربات در حال پر شدن هستند، تکنیسین ربات یا مسئول داروخانه اندازه ظرف مورد نیاز را بر اساس اندازه قرص ها تعیین می کند. بعد از اینکه ظرف مخصوص دارو پر شد، یک نوار نقاله آن را به یک نگه دارنده تحویل می دهد. در این قسمت نگه دارنده، ظرف دارو را در جای خود نگه می دارد و در عین حال، با چرخاندن آن حول محور مرکزی، امکان چسباندن برچسب نام بیمار را بر روی ظرف را فراهم می کند. پس از اینکه ربات برچسب لازم را بر روی طرف دارو چسباند، ظرف مجددا به نوار نقاله دیگری سپرده می شود و این بار ظرف حاوی دارو به شیاری که در بالای آن نام بیمار با استفاده از چراغ های LED نمایش داده شده است فرستاده می شود. در این حالت، داروساز یا تکنیسین داروخانه، محتویات ظرف را چک می کند تا مطمئن شود، داروی صحیح برای فرد صحیح پر شده است و سپس ظرف را بسته بندی می کند و آن را به قسمت جلو داروخانه می فرستد تا به بیمار تحویل داده شود. این ربات از نظر زمانی بسیار پربازده است.
ربات Robot RX محصول شرکت McKesson یکی دیگر از محصولات رباتیک مربوط به سلامتی است که به داروخانه ها کمک می کند در طول روز هزاران دارو را بدون هیچ خطا یا با خطایی بسیار کم، توزیع کنند. این ربات میتواند عرضی معادل 10 فوت و طولی معادل 30 فوت داشته باشد و صدها نوع داروی مختلف را با دوز های متفاوت در خود جای می دهد. با کمک این ربات، داروخانه در منابع مختلف مثلا نیروی انسانی صرفه جویی می کند.
این دستگاه از یک هِد الکترومکانیکی در کنار یک سیستم پنوماتیکی( با فشار هوا) استفاده می کند تا دارو های مختلف با دوز های متفاوت را بردارد و آن را به محل تحویل یا به محل انبار دارو های خود منتقل کند. هِد دستگاه در راستای یک محور حرکت می کند و در عین حال میتواند 180 درجه بچرخد تا دارو های مختلف را از قسمت های مختلف بردارد. در طول این فرآیند، ربات از فنّاوری بارکد استفاده می کند تا مطمئن شود در حال برداشتن داروی صحیح است. سپس ربات این دارو را به سبد مخصوص بیمار که بر روی یک نوار نقاله قرار گرفته است منتقل می کند. وقتی سبد با همه داروهایی که بیمار به آن نیاز دارد پر شد، سبد آزاد می شود و از طریق نوار نقاله به دست تکنیسین داروخانه می رسد که منتظر است تا آن را به سبدی دیگر منتقل کرده و به طبقه اصلی داروخانه ببرد.
رباتهای تحقیقاتی
اگرچه امروزه بیشتر رباتها در منازل یا کارخانه ها مورداستفاده قرار میگیرند و کار های بسیار مفیدی را انجام میدهند، انواع جدید رباتها در آزمایشگاه های مختلفی در سرتاسر جهان در حال توسعه یافتن هستند. بیشتری تحقیقاتی که در حاضر در زمینه رباتیک انجام می شود بر روی کار های مخصوص به یک صنعت خاص متمرکز نیست بلکه عمده تحقیقات در زمینه ساخت انواع جدیدی از رباتها و روشهای مختلف برای طراحی و تولید آنها می باشد. انتظار میرود زمانی که ساخت انواع جدید رباتها در مقیاس بزرگ عملی شود، آنها بتوانند مسائل دنیای واقعی را حل کنند.
رباتهای بیونیک و بیومیمتیک(زیست تقلید)
یکی از نگرش های موجود برای طراحی رباتها، این است که آنها را بر اساس حیوانات طراحی کنند. رباتی به نام بیونیک کانگورو با مطالعه و اِعمال فیزیولوژی و روشهای حرکتی کانگورو طراحی و ساخته شد.
نانو رباتها
نانو رباتیک، یک زمینه فنّاوری در حال ظهور است که هدف آن ساخت ماشینها یا رباتهایی است که اجزای آنها ابعادی نزدیک یا برابر با ابعاد میکروسکوپی نانومتر(10−9 متر) دارند. این رباتها که با نام نانوبات نیز شناخته میشوند از ماشینهای مولکولی ساخته میشوند. تاکنون محققان بیشتر توانسته اند قطعات مختلف این سیستمهای پیچیده مانند یاتاقان، سنسورها و یا موتور های مولکولی مصنوعی را تولید کنند، البته نانو رباتهای کامل نیز ساختهشدهاند که برای نمونه میتوان به شرکتکنندگان مسابقات روبوکاپ نانورباتها اشاره کرد.
محققان همچنین امیدوارند تا بتوان رباتهای کاملی را بسازند که به اندازه ویروس ها یا باکتری ها باشند و بتوانند کار های مختلفی را در مقیاس بسیار کوچک انجام دهند. از کاربرد ها احتمالی این گونه رباتها میتوان به عمل جراحی در مقیاس میکروسکوپی (در مقیاس سلول های بدن)، استفاده از چندین نانو ربات در کنار هم (Utility Fog) و کاربردهای بسیار زیاد در تولید، تسلیحات جنگی و نظافت اشاره کرد. برخی افراد معتقدند اگر نانو رباتهایی وجود داشته باشد که بتوانند تکثیر شوند، سناریوی Grey goo اتفاق میافتد. در این سناریو، نانورباتها به قدری تکثیر میشوند که به این شیوه همه چیز را در جهان می بلعند و اکوسیستم را با تغییر هر آنچه برای آنها نامطبوع است تخریب خواهند کرد. البته عده دیگری معتقدند چنین سناریو فرضی کاملا مهمل است.
نانو ربات Utility Fog
رباتهای شکل پذیر
تاکنون چندین محقق امکان ساخت رباتهایی را که میتوانند شکل فیزیکی خود را تغییر دهند تا برای انجام کاری خاص مناسب باشند را بررسی کردهاند که برای نمونه میتوان به ربات تخیلی T-1000 در فیلم ترمیناتور اشاره کرد. با این وجود، رباتهای واقعی اصلا به پیچیدگی T-1000 نیستند و عمدتاً از تعداد کمی اجزای مکعبی شکل تشکیل شدهاند که میتوانند نسبت به اجزای مجاورشان حرکت کنند. در صورتی که چنین رباتهایی به واقعیت تبدیل شوند، الگوریتم هایی نیز برای آنها طراحی شده است.
رباتهای نرم تن
این دسته از رباتها از بدنه های سیلیکونی و محرک های انعطاف پذیر( ماهیچه های مصنوعی پنوماتیکی، پلیمر های الکترواکتیو و فروسیال ها) ساختهشدهاند و ظاهری متفاوت نسبت به رباتهای با ساختار صلب دارند. این رباتها میتوانند رفتار ها و کاربردهای مختلفی داشته باشند.
رباتهای ازدحامی
این گونه از رباتها، از کلونی حشراتی مانند زنبورعسل و مورچه ها الهام گرفته شدهاند. محققان در حال تلاشند تا با مدل سازی رفتار زنبور ها و مورچه ها، ازدحامی از هزاران ربات کوچک بسازند که بتوانند با کمک یکدیگر، کار های مفیدی مانند پیدا کردن یک شی مخفی، نظافت و یا جاسوسی را انجام دهند. هر ربات عضو مجموعه، بسیار ساده است اما رفتار ناشی از ظهوریافتگی این مجموعه پیچیده تر است. در واقع همان طور که یک کلونی مورچه را میتوان بهعنوان یک ابر ارگانیسم در نظر گرفت که دارای هوش ازدحامی است؛ به طور مشابه نیز میتوان کل مجموعه این رباتها را بهعنوان یک مجموعه توزیع شده در نظر گرفت. بزرگترین مجموعه رباتهایی که تاکنون ساخت شدهاند شامل مجموعه iRobot، رباتهای پروژه CentiBots و مجموعه رباتهای پروژه منبع باز Micro-robotic هستند که از آنها برای تحقیق بر روی رفتار گروهی رباتها استفاده می شود. مجموعه رباتها، در برابر خرابی مقاوم تر هستند. در حالی که یک ربات بزرگ ممکن است خراب شود و یک ماموریت را به طور کامل نابود کند، یک مجموعه از رباتها، حتی با از دست دادن چند عضو نیز به کار خود ادامه خواهد داد. این ویژگی، رباتهای ازدحامی را به گزینه های هیجان انگیز و جذاب برای اکتشافات فضایی تبدیل کرده است زیرا در این گونه ماموریت ها، شکست در ماموریت معمولا هزینه های بسیار بالایی را در بر دارد.

نمایی از ریز ربات های ازدحامی یا گروهی
رباتهای رابط لمسی
رباتیک در طراحی رابط های واقعیت مجازی نیز کاربرد دارد. امروزه، رباتهای مخصوص در زمینه تحقیقات مربوط به فناوری لمسی به طور گسترده ای مورداستفاده قرار میگیرند. این رباتها، که به آنها “رابط های لمسی” گفته می شود، امکان تعامل کاربر را بهصورت لمسی با محیط های واقعی و مجازی فراهم می کنند.در واقع در این فرآیند، نیرو های رباتیکی امکان شبیهسازی خواص مکانیکی اجسام مجازی را فراهم می کنند و در نتیجه، کاربر میتواند آنها را از طریق حس لامسه خود، احساس کند.
رباتها در فرهنگ عامه
ربات در ادبیات
شخصیت های رباتی، اندروید ها ( زنان و مردان مصنوعی)، ژینوئید ها (زنان مصنوعی) و سایبورگ ها (انسانهایی که از اجزای مکانیکی مختلفی در بدن خود بهره میبرند) به رکن اساسی داستانهای علمی – تخیلی تبدیل شدهاند.
در ادبیات غربی، اولین اشاره به خدمتکار های مکانیکی در کتاب ایلیاد که توسط هومر نوشته شده مطرح می شود. در کتاب هجدهم، هفائستوس، خدای آتش با کمک رباتها زره جدیدی را برای آَشیل قهرمان می سازد. بنا به نسخه ترجمه شده توسط Rieu، “خدمتکاران طلایی به کمک اربابشان شتافتند؛ آنها شبیه به زنان واقعی بودند و نه تنها میتوانستند صحبت کنند و از اعضای بدنشان استفاده کنند بلکه، خدایان جاودان به آنها هوش عطا کرده بودند و مهارت کار دستی را به آنها آموخته بودند.” البته واضح است که از کلمات ربات یا ربات انساننما برای توصیف این خدمتکاران استفاده نشده است اما در هر حال، این خدمتکاران، دستگاههایی مکانیکی بودند که ظاهری شبیه به انسان داشتند. همان طور که گفته شد، اولین استفاده از کلمه ربات در نمایشنامه کارخانه رباتسازی روسوم که توسط کارل چاپک، نویسنده اهل جمهوری چک اتفاق افتاده است.
شاید بتوان ایزاک آسیموف (1920-1992) را پرکارترین نویسنده قرن بیستم دانست. او بیش از 500 کتاب منتشر کرد. همه آسیموف را به خاطر داستانهای علمی-تخیلیش به خاطر دارند؛ بهخصوص آن داستانهایی که مربوط به رباتها بودند. آسیموف، رباتها و تعامل آنها با جامعه را نقطه مرکزی بسیاری از داستانهای خود قرار داده بود. او با دقت فراوان مسئله دستورالعمل های ایده آلی را که ممکن بود به یک ربات داده شود تا خطرش برای انسانها کمتر شود را در نظر گرفت و در نهایت، توانست سه قانون اصلی رباتیک خود را به این ترتیب بیان کند:
- یک ربات نمیتواند به انسان صدمه بزند یا با واکنش نشان ندادن، اجازه دهد تا یک انسان صدمه ببیند
- یک ربات باید به استثنا مواردی که منجر به نقض قانون اول می شود، از دستوراتی که توسط انسان به او داده می شود اطاعت کند
- یک ربات باید تا زمانی که محافظت از خودش منجر به نقض قانون های اول و دوم نشود، از موجودیت خود محافظت کند.
او این قوانین را اولین بار در سال 1942 در داستان کوتاهی به نام Runaround معرفی کرد. البته این قوانین به طور ضمنی در چند داستان قبلی او نیز مطرحشده بودند. بعد ها، آسیموف قانون صفرم را نیز به این مجموعه اضافه کرد: “یک ربات نمیتواند به بشریت آسیب رساند یا با واکنش نشان ندادن، اجازه دهد تا بشریت آسیب ببیند.” قانون های بعدی نیز برای در نظر گرفتن این قانون، کمی تغییر کردند.
بنا به فرهنگ لغت انگلیسی آکسفورد، اولین بخش از داستان کوتاه آسیموف به نام دروغگو(1941) که در آن به قانون اول نیز به طور ضمنی اشاره می شود، اولین مورد ثبتشده استفاده از کلمه رباتیک است.نکته جالب این است که آسیموف خود از این موضوع خبر نداشت؛ او فکر می کرد این واژه که شباهت زیادی با واژه های مکانیک، هیدرولیک و واژه های مشابه دیگر که به شاخه های مختلف علوم کاربردی اشاره دارند، از قبل وجود داشته است.
ربات در فیلم ها
رباتها در فیلم های بسیاری دیده شدهاند. بیشتر رباتهایی که در سینما دیده میشوند تخیلی هستند. بهعنوان نمونه هایی از رباتهای تخیلی میتوان به رباتهای R2-D2 و C-3PO از مجموعه فیلم های جنگ ستارگان و ربات T800 در فیلم ترمیناتور اشاره کرد.

ربات T800 در مجموعه فیلم های ترمیناتور
رباتهای جنسی
مفهوم رباتهای شبیه به انسان که کارکردشان، برطرف کردن نیاز های جنسی انسان است هم باعث جلب توجه عمومی و هم باعث نگرانی های بسیاری شده است. مخالفین این مفهوم معتقدند توسعه رباتهای جنسی از نظر اخلاقی درست نیست. آنها ادعا می کنند ساخت چنین دستگاهی، آسیب های اجتماعی بسیاری را در پی خواهد داشت و باعث تحقیر زنان و کودکان خواهد شد.
مشکلاتی که در فرهنگ عامه نشان داده شده است
ترس و نگرانی از رباتها، به طور گسترده ای در کتاب ها و فیلم های مختلف بیان شده است. یکی از زمینه های معمول، تشکیل نژادی برتر از رباتهای خودآگاه و کاملا هوشمند است که برای براندازی یا نابودی انسانها تلاش می کنند. رمان فرانکنشتاین(1818) که بهعنوان اولین رمان علمی-تخیلی شناخته می شود نیز با این زمینه که یک ربات بتواند جای خالق خود را بگیرد مترادف شده است.
کار های دیگری که زمینه ای مشابه دارند شامل مرد مکانیکی، ترمیناتور، من-ربات و یا سه گانه ماتریکس هستند. برخی از رباتهای تخیلی برای کشتن و نابود کردن برنامه ریزی شدهاند؛ برخی دیگر با بهروزرسانی نرم افزار و سخت افزار خود، به هوش و تواناییهای فرا انسانی دست می یابند. نمونه های دیگری از رسانه هایی که در آن رباتها به موجودات شیطانی تبدیل میشوند شامل 2001: A Space Odyssey، Red Planet و Enthiran هستند.
بازی کامپیوتری Horizon Zero Dawn به زمینه هایی چون استفاده از رباتها بهعنوان سلاح، مسائل اخلاقی مربوط به رباتها و مسئله کنترل هوش های مصنوعی می پردازد و همچنین اثرات مثبت و یا منفی چنین فنّاوری هایی را بر روی محیط زیست را مطرح می کند.
یکی دیگر از زمینه های بسیار متداول، حس اضطراب و حتی عصبانیت انسانها در مواجه با رباتهای انساننمایی است که رفتارشان هیچگونه فرقی با انسانهای عادی ندارد. از نظر علمی به این پدیده دره وهمی گفته می شود.
اخیرا، استفاده از رباتهای هوشمند در فیلم هایی مانند A.I. Artificial Intelligence و Ex Machina و همچنین سریال تلویزیونی Westworld ( محصول سال 2016) باعث ایجاد حس همدردی مخاطبان نسبت به خود رباتها شده است.
امیدوارم از این مقاله مدیاسافت نهایت بهره را برده باشید.


{kind=link}
65 Comments
سلام وخسته نباشیدخدمت شما
رباتیک بسیاربسیارعالی بودبحثشون و بنده تاالآن ازربات این قدراطلاع نداشتم وتصمیم گرفتیم که پایان نامه ام این موضوع باشند . باتشکر .
با عرض سلام و درود خدمت شما
ممنون بابت نظر لطف شما
موفق باشید.
سلام من موضوع پروژم حفظ تعادل درربات ها با استفاده ازهوش مصنوعی هستش میشه یکم راهنماییم کنید مطلبی در این خصوص پیدا نمیکنم ممنونم مطالبتئن واقعا عالیه
اگر امکانش هست این مقاله رو برام ایمیل کنید ممنونم ازتون
با عرض سلام و احترام
در این خصوص به زودی مقاله ای در وب سایت مدیاسافت منتشر خواهد شد
موفق باشید.
با سلام
مطالب بسیار مفید و سودمند بود امکانش هست مطالبو ایمیل کنید؟
با عرض سلام و احترام
مقاله ارسال شد.
با سلام . ممنون بابت اشتراک این مقاله . لطف میکنید اگر این مقاله رو برای من ایمیل کنید
با عرض سلام و احترام
مقاله ارسال شد
سلام جناب ملازاده ، جسارتا فایل به دست من نرسیده ، شاید من ایمیل رو اشتباه وارد کردم مجددا ایمیل رو میفرستم براتون ، ممنون میشم اگر مجدد قبول زحمت کنید
سلام خسته نباشین بسیار عالی و آموزنده بود
ببخشین بنده موضوع تحقیقم در باره رباتیک دررشته الکترونیک است . اگه امکان داره مطلب یا مقاله در این رابطه دارین رابرای بنده ارسال کنین
ممون و سپاسگذارم
با عرض سلام و احترام فراوان
مقاله ارسال شد
سلام ممنونم بابت این مقاله مفید
لطف میکنید این مقاله را به من ایمیل فرمایید
با سلام و درود فراوان خدمت شما
مقاله ارسال شد
بنده رشتم مهندسی رباتیک هستش باتشکر از مدیریت سایت و مطالب بسیار خوبی که از رباتیک گذاشته بودن ، لازم میدونم حقیقتی که باعث شد این رشته بزرگ از ایران حذف گردد رو بگم تا مردم بیشتر این دولت روحانی و اصلاح طبلان رو بشناسند . رشته رباتیک در سال ۱۳۹۳ طبف توافقات برجام در بین ۸ رشته حذفی در ایران قرار گرفت و متاسفانه حذف گردید.و طبق این توافق ایران حق تدریس این رشته در دانشگاه ها را ندارد.
با عرض سلام و احترام و ممنون از نظر شما
با سلام و خسته نباشید
مقاله مفیدی بود.
بی زحمت مطلبو به بنده ارسال کنید. ممنون
با سلام و عرض احترام
مقاله خدمت شما ارسال شد.
سلام جناب ملازاده<بسیار مفید و اموزنده بود
لطف میکنید برام ایمیلش کنید.
سپاسگذارم
با عرض سلام و احترام فراوان ، مقاله خدمت شما ارسال شد.
با سلام
لطف میکنید مقاله این بخشو برام ایمیل کنید . باتشکر
با عرض سلام و احترام
مقاله ارسال شد.
مطلب آموزنده و مفیدی بود
ممنون میشم مقاله رو برام ایمیل بزنین
با عرض سلام و احترام و تشکر بابت نظر لطف شما؛
مقاله ارسال شد.
سلام وقت بخیر مطالب بسیار مفید و کاربردی هست.
لطف می کنید برای من ایمیل کنید؟
با سلام و اعرض احترام
مقاله ارسال شد
سلام . مقاله خیلی بدرد من خورد حیفم اومد از زحماتتون تشکر نکنم .
با عرض سلام و احترام
ممنون از نظر لطف شما
با تشکر از شما و تمام دانش پژوهان عزیز.
با عرض سلام و احترام و تشکر بابت نظر لطف شما؛
سلام وقتتون بخیر
ممنون از اشتراک این مقاله ی مفید
میشه لطفا برام ایمیل کنید؟
با عرض سلام و احترام و تشکر بابت نظر لطف شما؛
مقاله ارسال شد.
با عرض سلام
مرسی از مطالب بسیار مفیدتون
میتونم فایل این مقاله رو داشته باشم
با سپاس
با عرض سلام و احترام و تشکر بابت نظر لطف شما؛
مقاله ارسال شد.
با عرض سلام و خسته نباشید مقالتون بسیار عالی هستش اگه امکانش هست این مقاله را برای من ایمیل کنید با تشکر
با سلام و عرض احترام و تشکر از نظر محترمتون، مقاله ارسال شد خدمت شما.
با سلام
خداقوت
امکانش هست فایل را هم داشته باشم
با عرض سلام و احترام
از این تاریخ به بعد امکان کپی برداری از مقالات وب سایت برای کاربران عزیز فعال گردیده.
تمام سعی تیم تلاشگر مدیاسافت ارائه، ترجمه و نشر مقالات علمی کاملا رایگان برای ارتقا سطح دانش کشور و علاقمندان به حوزه علم و فناوری می باشد.
امیدوارم با ذکر نام وب سایت “مدیاسافت” به عنوان منبع اصلی ترجمه ی این مقالات در حفظ و رعایت حقوق ناشر و مترجم گام بردارید.
با تشکر از شما عزیزان
سلام. مقاله ای خیلی مفیدی بود. اگر ممکنه لطف کنید برایم بفرستید ؟!
ممنون
با سلام و احترام
مقاله ارسال شد
با سلام مقاله ای بسیار بسیار عالی بود میتونید مقاله رو واسم ایمیل کنید ممنون
با عرض سلام و احترام
از این تاریخ به بعد امکان کپی برداری از مقالات وب سایت برای کاربران عزیز فعال گردیده.
تمام سعی تیم تلاشگر مدیاسافت ارائه، ترجمه و نشر مقالات علمی کاملا رایگان برای ارتقا سطح دانش کشور و علاقمندان به حوزه علم و فناوری می باشد.
امیدوارم با ذکر نام وب سایت “مدیاسافت” به عنوان منبع اصلی ترجمه ی این مقالات در حفظ و رعایت حقوق ناشر و مترجم گام بردارید.
با تشکر از شما عزیزان
با عرض درودو خسته نباشیدخدمت شما استاد عزیز
رباتیک بحثشون بسیاربسیارعالی و آموزنده بود و بنده تا الان ازربات این قدراطلاع چندانی نداشتم که تصمیم گرفتم پروژه ام در خصوص ربات در صنایع خودرو سازی باشد، از کجا مقاله ای در این خصوص تهیه کنم.
((با سپاس فراوان))
با عرض سلام او حترام
ممنون در خصوص نظر لطف شما
در مورد کاربرد رباتیک در صنعت خودرو سازی مقالات بسیار زیادی در بستر اینترنت موجود هستش که با سرچ عباراتی مانند عبارت زیر میتونید مطلب مورد نظرتون رو پیدا کنید:
“Automotive robots in the Car manufacturing industry”
سلام و خسته نباشید
مطلب بسیار مفیدی بود و من برای پروژه ام میخوام ازش استفاده کنم
فقط ممنون میشم مقاله شو برام ارسال کنید.
با عرض سلام و احترام
مقاله ارسال شد
سلام و خسته نباشید
با تشکر از مطالب مفید شما
موضوع سمینار کارشناسی ارشد من “بررسی روش های کنترل موقعیت موتور DC به عنوان محرکه بازوهای ربات خانگی” هستش،مقاله ای در این خصوص دارین؟
یا از کجا میتونم پیدا کنم؟
با عرض سلام و احترام
مقاله ای در این زمینه در حال ترجمه و انتشار هستش
خیلی خیلی این مطالب به دردم خورد
ممنونم از شما اقای فرید ملازاده
با عرض سلام و ادب و احترام و تشکر از مطالب مفیدتون
اگر ممکنه مقاله رو برای بنده نیز ایمیل کنید
عرض سلام و ادب
مقاله ارسال شد
سلام و خسته نباشد واقعا معلومات مفید است
و میشه لطف کنید همین را به شکل PDF ایمیل کنید
عرض سلام و احترام
مقاله ارسال شد
سلام
مقاله جامع و کاملی بود.
آیا امکانش است مقاله را برای من ارسال نمایید؟
باتشکر
عرض سلام و احترام
مقاله ارسال شد
درود،ممنون از سایت سایت بسیار خوب و جامع و کاملتون..ممنون میشم اگر این مقاله رو برای من ارسال کنید.
سلام خسته نباشید،مطالب خوبی بود،دستتون درد نکنه
فقط اینکه موضوع پروژه بنده ادراک ربات هستش،مطلبی در این خصوص ندارید؟
عرض سلام واحترام
ممنون از نظر لطف شما
در آینده ای نزدیک مقاله ای در این خصوص منتشر خواهد شد
سلام خسته نباشد
مقاله بنده در مورید هوش مصنوعی و ربات در اینده شغلی هست اگر کدام مقاله و یا پایان نامه در مورید دارید بفرستید
تشکر از همکاری پیش از پیش
عرض سلام و احترام
مقاله ارسال شد
خیلی خیلی عالی به جواب خیلی از سوالاتم رسیدم ممنون
ممنون از نظر لطف شما
سلام دوست عزیز اگر لطف کنید این پروژه رو برا بفرستید برا پروژه ام لازمش دارم ممنون ❤️
به این ایمیل ارسال کنید
عرض سلام و احترام
مقاله ارسال شد
سلام
تشکر خیلی مقاله عالی بود
میشه برای ما هم ایمل کنید
با تشکر از نظر لطف شما
مقاله ارسال شد