ثبت رکورد انتقال داده با نرخ ۵۷Gbps خطوط فیبر نوری
فروردین ۷, ۱۳۹۵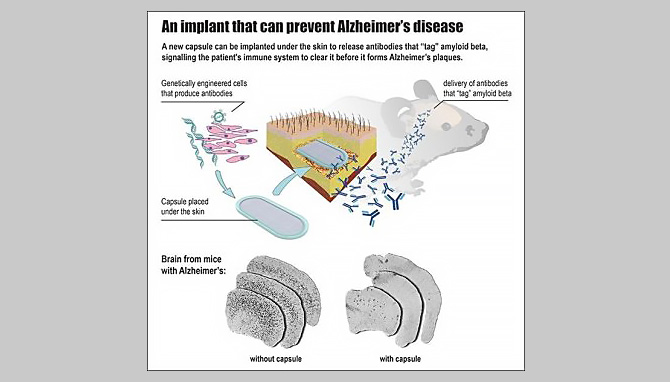
ایمپلنتی که می تواند جلوی آلزایمر را بگیرد
فروردین ۷, ۱۳۹۵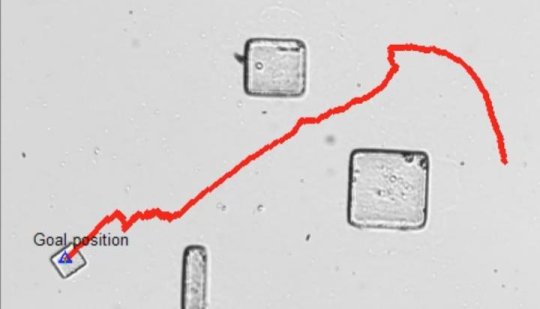
مهندسین اخیراً مقاله ای در مورد روش استفاده از میدانهای الکتریکی جهت کمک به حرکت روباتهای زیستی بسیار کوچک با کمک باکتریهای تاژکدار منتشر کرده اند. این روباتها که میتوانند به این وسیله در محیطی سیال موانع را پشت سر بگذارند میتوانند در آینده برای ساخت ابزارهای میکروسکوپیک و حتی انتقال دارو به سلولها استفاده شوند.
محققان دانشگاه درکسل راهی برای استفاده از میدانهای الکتریکی جهت کنترل میکرو روباتها در محیط های سیال و تشخیص خودکار موانع و تغییر مسیر به سمت مقصد یافته اند. این فن آوری در آینده می تواند به کار انتقال دارو در بدن و ساخت ابزارهای میکروسکوپیک بیاید.
مساله ی حرکت دادن روبات با کمک تعدادی باکتری تاژکدار مساله ایست که مشخص نیست به کجا بیانجامد. روباتهای ریز و زیستی که اندازه ی تراشه ای کوچک با پوشش باکتریهای تاژکدار هستند نتیجه ی تحقیقات سالهای اخیر در حوزه ی روباتها جهت ساخت ابزارهای میکروسکوپیک و انتقال دارو به سلولها می باشند. اما اینکه چگونه بتوانیم از این روباتها استفاده بریم مانند تمام روباتها مستلزم پر کردن شکاف بین حرکت این روباتها و خودکار سازی آنهاست. طبق مقاله ای که در نشریه ی IEEE Transactions on Robotics منتشر شده به نظر می رسد گروهی در دانشگاه درکسل توانسته اند این شکاف را پر کنند و با استفاده از میدانهای الکتریکی روباتها را در محیطی سیال حرکت دهند.
در ادامه ی گزارشی که در سال 2014 منتشر شد و حاوی راهکارهایی برای استفاده از باکتری تاژکدار Serratia marcescens و میدان الکتریکی جهت حرکت میکرو رباتها بود دکتر مین جون کیم (پروفسور کالج مهندسی و مدیر آزمایشگاه BAST دانشگاه درکسل) اخیراً روشی برای سریع الانتقال ساختن این روباتها ابداع کرده است.
کیم در این مورد می گوید: “کشتی بدون ناخدا چه سرنوشتی خواهد داشت؟ میدانیم میدان الکتریکی را می توان برای حرکت دادن روباتها به جلو و در هر جهتی استفاده کرد درست مانند قایقی که جریانهای اقیانوس آنرا به جلو می برند اما ما در مقاله ی حاضر به این موضوع پرداخته ایم که چگونه می توان از این میدانهای الکتریکی برای تشخیص موانع و ناوبری اطراف آنها استفاده کرد.”
ناوبری و حرکت روباتهای هیبریدی ریز هر دو توسط باکتری S. marcescens تامین می شود. این شناگرهای میله ای شکل که متهمین اصلی عفونتهای مجاری ادرار و تنفسی هستند بطور طبیعی بار منفی دارند و نتیجتاً می توان آنها را مانند پیکسلهای نمایشگرها بوسیله ی میدان الکتریکی تحریک و دستکاری کرد.
زمانیکه لکه ای آغشته به این باکتری را به لایه ای (در اینجا تراشه ای مربع از مواد حساس به نور به نام SU-8) می افزاییم میکرو روباتی کوچک خواهیم داشت که میتواند در میان امواج الکتریکی در محیط سیالات حرکت کند. تاژک شلاقی باکتری ضمن معلق نگاه داشتن روبات در سیال کمی حرکت رو به جلو هم به آن می دهد. اصل حرکت روبات ناشی از دو میدان الکتریکی عمود برهم می باشد که سیال را به شکل شبکه ای الکتریکی در می آورند. بدلیل بار منفی باکتریها گروه تحقیقاتی توانست تنها با استفاده از بالا و پایین بردن توان جریان الکتریکی روبات را وادار به حرکت دلخواه کند.
کیم در این مورد گفت: “نشان دادیم میتوانیم روبات را بصورت دستی هدایت کنیم و یا با مشخص کردن مبدا و مقصد (از نقطه ی A به نقطه ی B) آن را به حرکت در آوریم اما هدف تحقیق ما فراهم کردن امکانی است تا روبات بتواند مسیر خود را از میان موانعی که بصورت نا منظم سر راهش قرار گرفته اند بیابد. این امر مستلزم دستیابی به سطحی از خودکارسازی حرکت روباتهاست که در حوزه ی میرو روباتهای هیبریدی تا به حال امکان پذیر نبوده است.”
گروه کیم برای رسیدن به این هدف الگوریتمی کنترلی پدید آورد که به ریز روباتها امکان استفاده ی موثر از شکل میدان الکتریکی برای پیدا کردن موانع و جلوگیری از تصادم با آنها را می داد درست مانند موج سواری که با بالا و پایین رفتن روی موجها از خطرات زیر آب دوری می کند.
با استفاده از مجموعه ای آزمون با کمک ذرات باردار گروه توانست بفهمد چگونه میدان الکتریکی زمانیکه با موانع روبرو می شود تغییر می کند. در مقاله آمده است: “میدان الکتریکی در نزدیکی موانع تغییر شکل می دهد. ذراتی که از گوشه ی موانع عبور می کنند هم با وجود اینکه فضای بازی جلویشان قرار دارد بدلیل تغییر شکل میدان الکتریکی خط سیرشان تغییر می کند.”
گروه ، این تغییر شکل میدان را بعنوان داده های ورودی الگوریتم هدایتگر محسوب کردند. بنابراین زمانی که روبات تغییری را در الگوی میدان حس می کرد الگوریتم بصورت خودکار مسیرش را تصحیح می کرد تا با مانع برخورد نکند. در این وضعیت روباتها از میدان الکتریکی هم بعنوان روشی برای حرکت و هم بعنوان ناوبر استفاده می کردند.
الگوریتم علاوه بر اطلاعات میدان الکتریکی از ردیابی تصویر با استفاده از دوربینی میکروسکوپی نصب شده روی روبات هم جهت مشخص ساختن مبدا و مقصد حرکت روبات استفاده کرد.
کیم در این مورد می گوید: “با این سطح کنترل و ورودیهای محیطی میتوان برنامه ای نوشت تا میکرو روبات در زمان حرکتش تصمیم گیریهای ارزشمندی داشته باشد و بر آن اساس مسیرش را تغییر دهد. مثلاً اگر بخواهیم روبات بی توجه به مقدار مسافتی که حرکت می کند تا حد ممکن با موانع کمتری برخورد کند و یا کوتاهترین و مستقیم ترین مسیر به مقصد را انتخاب کند (حتی اگر با موانع برخورد کند) باید این توان را داشته باشیم. اگر بخواهیم روزی روباتها را در سیستمی پیچیده نظیر انتقال دارو یا تولید ریز ساختارها به کار گیریم این خودمختاری نسبی روبات گامی مهم محسوب خواهد شد.”
گام بعدی برای آزمایشگاه کیم توسعه ی سیستمی حاوی چند میکرو روبات نیرو گرفته از باکتری است که بتوانند چندین سلول زنده را در محیط آزمایشگاه تغییر دهند. چنین سیستمی کاربردهای متعددی خواهد داشت که از جمله ی آنها تغییر سلولهای بنیادی می باشد.
منبع: Science Daily